ROS has a steep learning curve. I remember when I first started learning ROS, my head was spinning. There was all this new vocabulary you have to learn: nodes, packages, subscribers, publishers, etc. It was like learning some obscure foreign language for the first time.
To get the most out of ROS, I recommend going through Part 1 and Part 2 of this tutorial. My advice to you is to not worry if everything seems complicated and doesn’t make sense. Don’t worry if you can’t understand how any of these abstract concepts connect to a real-world robot.
ROS is built in such a way that you need to work through the boring basics before you can use it to develop actual robotics projects. You have to walk before you learn how to run.
After you work through the basics of ROS, you’ll start applying those basics to actual robotics applications using ROS. It’s at that point that all that abstract stuff that you will learn below will come together and finally make sense.
If you start to build robots with ROS without learning the basics of ROS, you’ll get super confused. It would be like trying to go to a foreign country and trying to speak their language without ever having learned basic words and phrases.
ROS doesn’t allow you to skip steps in the learning process. You have to build your knowledge of the basics of ROS, brick by boring brick, in order to use it to build fun robots that solve real-world problems.
So be patient in the learning process, and I assure you that you’ll master ROS and will be building cool robots in no time.
In this post, we will install ROS Noetic Ninjemys. As of the date of this tutorial, ROS Noetic Ninjemys is the latest ROS distribution that has long term support. It will be supported until May 2025.
You Will Need
In order to complete this tutorial, you will need:
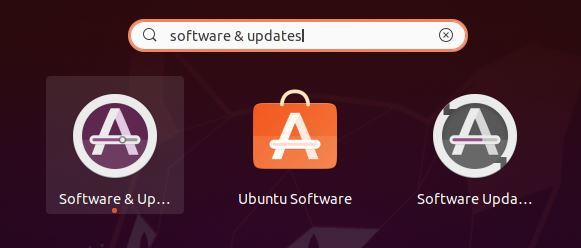
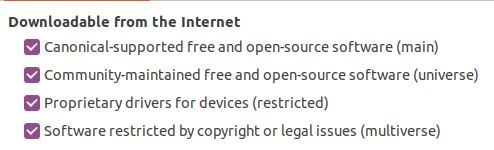
The official steps for installing ROS are at this link at ROS.org, but I will walk you through the process below so that you can see what each step should look like.
Now, update the package list. This command makes sure you have the most recent list of software packages that can be installed in your Linux system.
sudo apt update
Now do a full desktop install of ROS. The command below installs all the software, tools, algorithms, and robot simulators for ROS.
sudo apt install ros-noetic-desktop-full
After you type the command and press Enter, press Y and hit Enter when asked if you want to continue. It will take a while to download all this stuff, so feel free to take a break while ROS downloads to your system.
Set up the environment variables. These variables are necessary in order for ROS to work.
Type the following commands, one right after the other. We are using Bash, so this is what we type:
All the ROS software packages that you create need to reside inside a catkin workspace. The name of this catkin workspace can be anything, but by convention, it is typically called catkin_ws.
Open a new terminal window, and type the following commands, one right after the other.
First create the workspace.
mkdir -p ~/catkin_ws/src
Move inside the workspace.
cd ~/catkin_ws/
Build the workspace.
catkin_make
You should now have a build, devel, and src folder. Type this command to see those:
dir
Now, source the new setup.*sh file. This is a file that makes sure your workspace is recognized in your ROS environment.
source devel/setup.bash
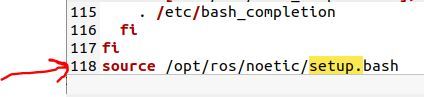
Let’s add this code to the .bashrc file so that we don’t have to run it everytime we open a new terminal window.
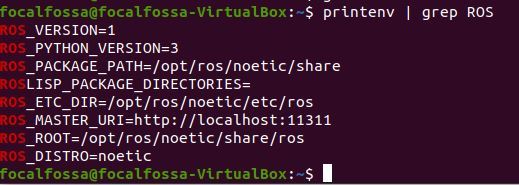
We can check to see if that was set up properly by typing this command:
echo $ROS_PACKAGE_PATH
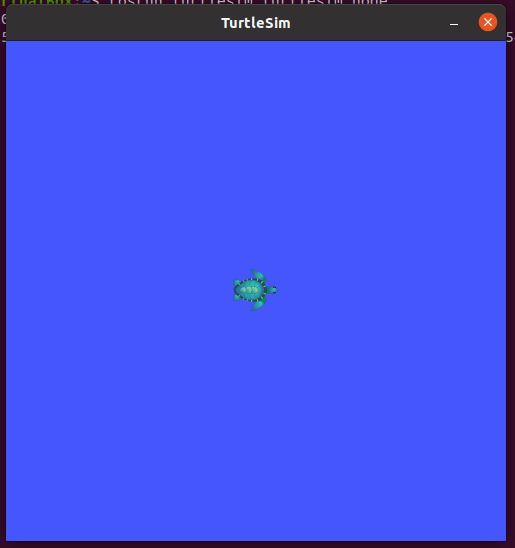
Finally, let’s launch a program to do a final check everything is set up properly. We will launch a simulation of a turtle.
Open a new terminal window, and type this command:
roscore
Open a new terminal tab, and type this command:
rosrun turtlesim turtlesim_node
Here is what you should see:
Congratulations. You have installed ROS!
From here, you can go check out the basics of ROS Noetic Ninjemys. If you’re already familar with ROS, it is often helpful to go through these tutorials to refresh the basics.
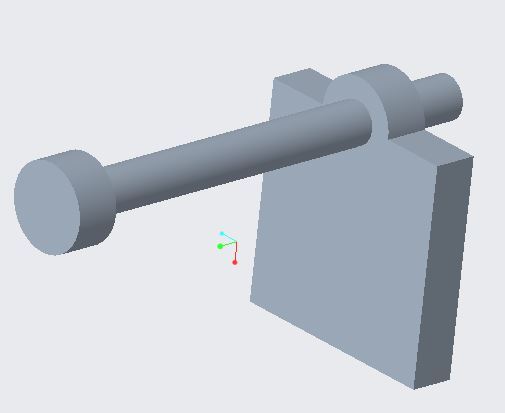
If you’re an absolute beginner to Creo Parametric, this tutorial is your guide. We’ll go step-by-step through the most common functions you’ll use again and again as you work with Creo Parametric for your design work. By the end of this tutorial, you’ll know how to create the animated part below.
Creo Parametric is a powerful 3D modeling CAD software program that is used by engineers all over the world. Without further ado, let’s get started!
Click OK on the window that pops up once you’ve selected your desired working directory.
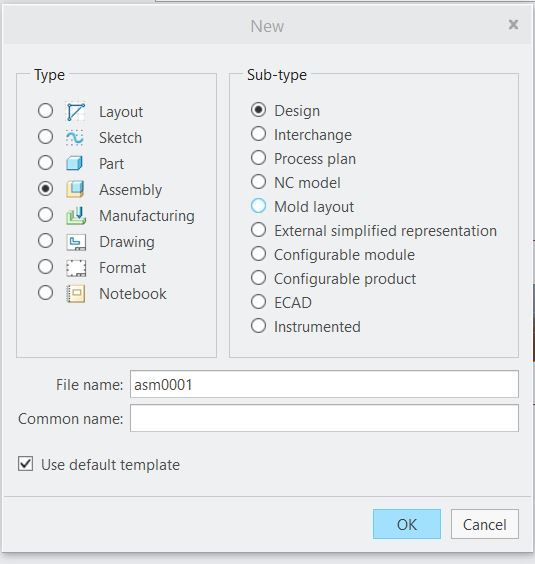
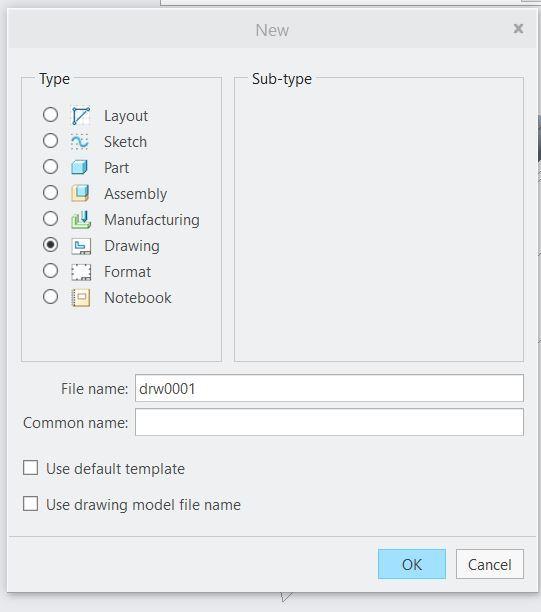
Click New.
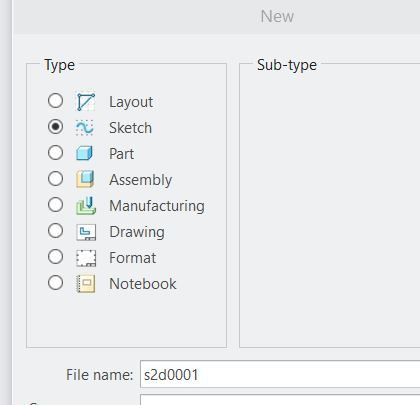
Select Sketch.
Click OK.
Go to File -> Options -> Sketcher.
Under “Accuracy and Sensitivity” change the Number of decimal places for dimensions to 3 (I like to use 3 decimal places).
Click OK.
Click No at the prompt.
Click the small arrow next to Rectangle on the Sketch tab on the top of your screen.
Select Center Rectangle.
Click a point anywhere.
Drag to create a rectangle.
Click another point to create the rectangle.
Click the Select button to stop creating rectangles.
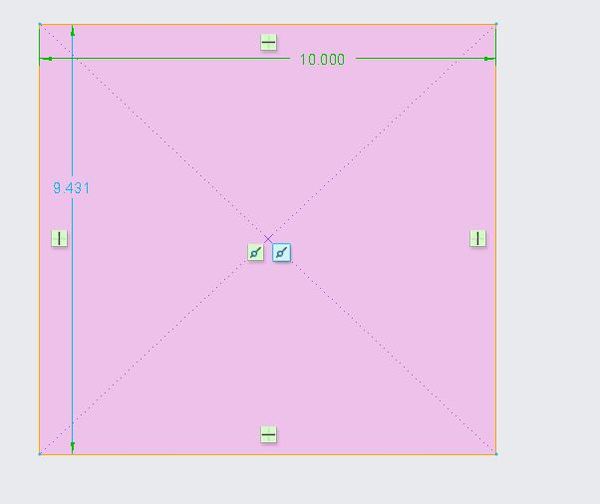
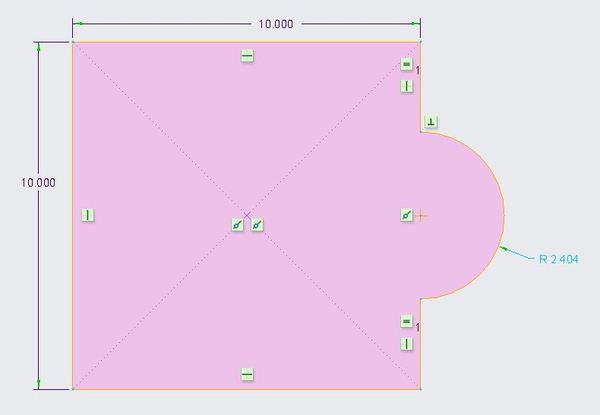
Double-click on one of the dimensions in order to alter it. In this case, I will make both the length and the width equal to 10.000.
The little green squares indicate the constraints. For example, the green square with the black line indicates that the corresponding side of the square is exactly horizontal. Likewise, the sides are vertical.
To shift the view on the screen, you hold down the Shift key on your keyboard while holding down the middle mouse button (or pressing the scroll wheel on your mouse). It is a bit awkward, but it is what it is.
Similarly, to rotate the object in your view, hold down the Ctrl key on your keyboard while pressing the middle mouse button (or pressing the scroll wheel on your mouse).
You can move the position of the dimension labels (e.g. the 10.000 markets) but click on them and dragging them to where you want them to be.
To save your rectangle, go to File -> Save and then click OK.
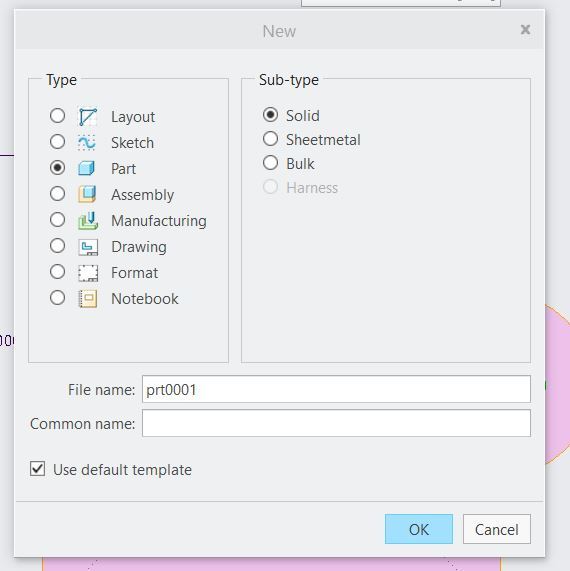
The default selection for Type is Part and Solid for Sub-type. These are fine.
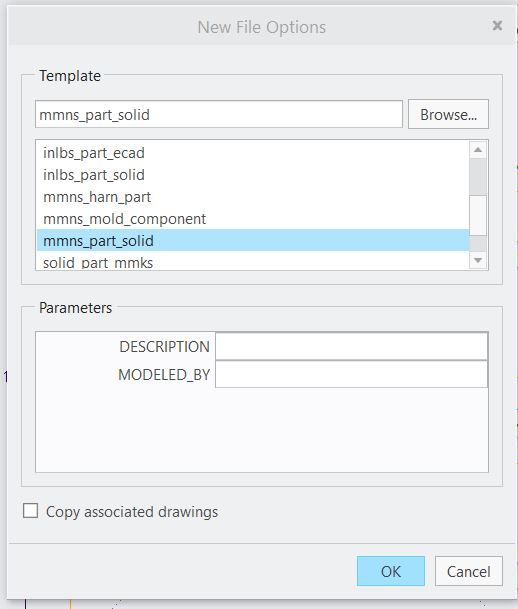
Uncheck the Use default template checkbox.
Click OK.
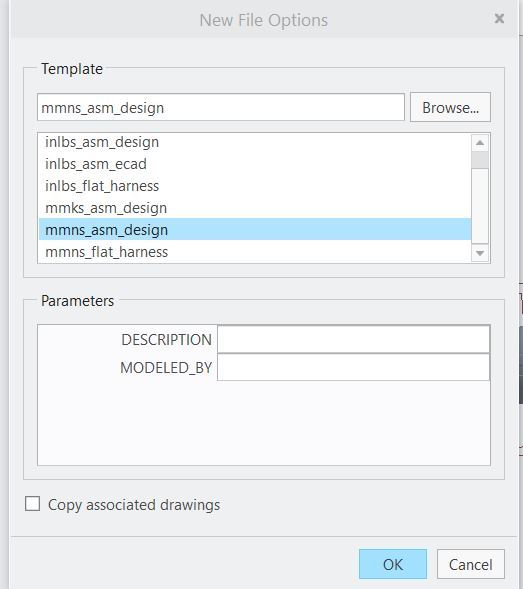
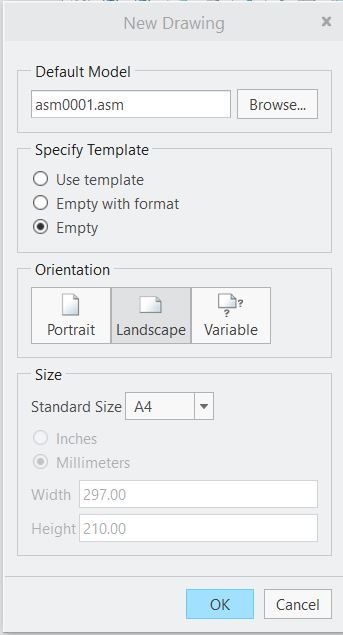
Select your units. Creo Parametric enables you to choose a variety of predefined systems of units.
I’ll select mmns_part_solid. mmns means millimeter Newton second, where all lengths are in millimeters, force will be in Newtons, and time will be in seconds.
Click OK.
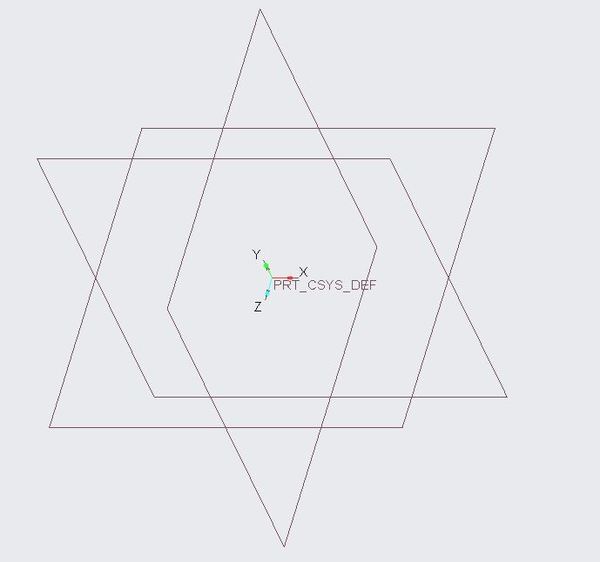
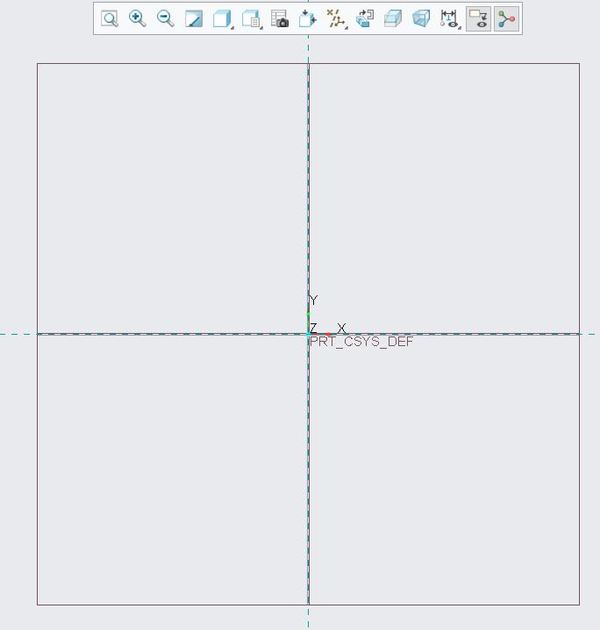
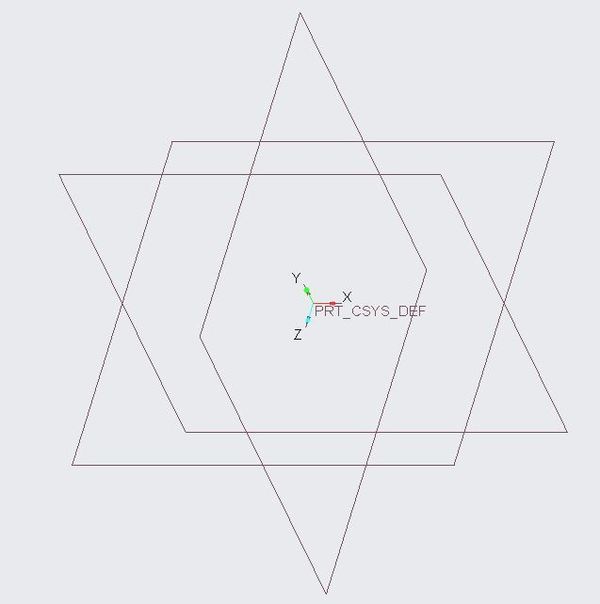
What you see in front of you are three different planes: RIGHT, TOP, and FRONT. These are the three dimensions that your part design will be limited to.
In Creo Parametric, the defaults are:
RIGHT = YZ plane
TOP = XZ plane
FRONT = XY plane
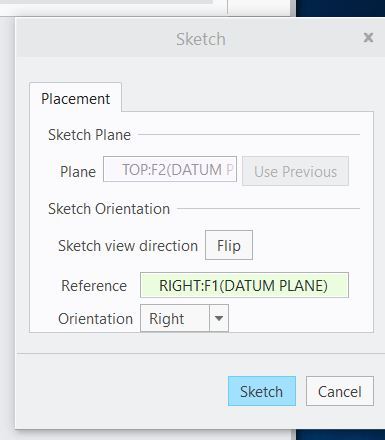
Let’s select the FRONT plane by clicking on it. This is your standard XY plane in the Cartesian Coordinate system.
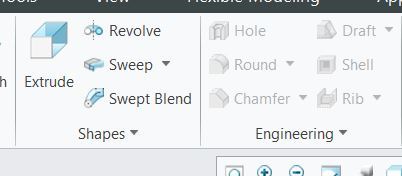
Click the Extrude button.
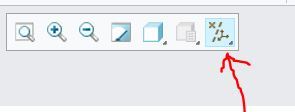
Click the Sketch View button to flatten the sketch. The Sketch View button is on the small toolbar above the sketch.
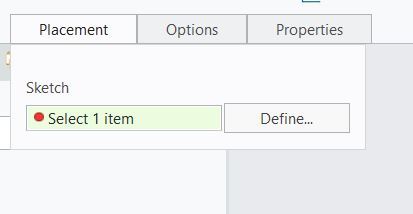
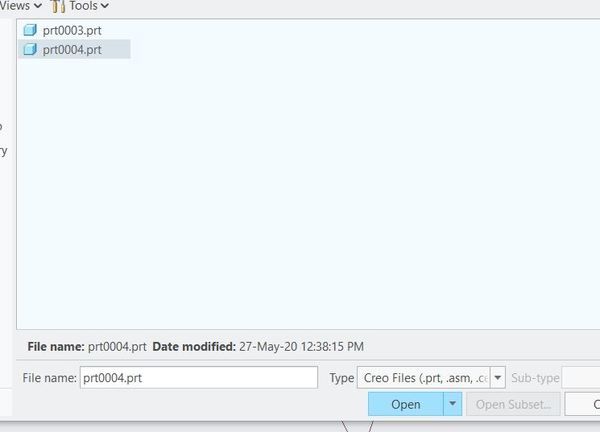
Click File System in the upper-left part of the screen.
Select the file we’ve been working on so far and click Open.
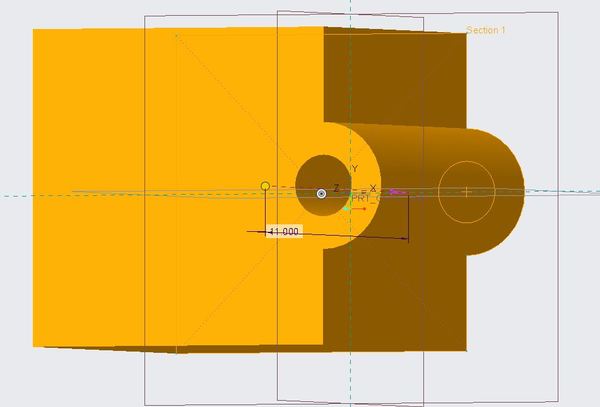
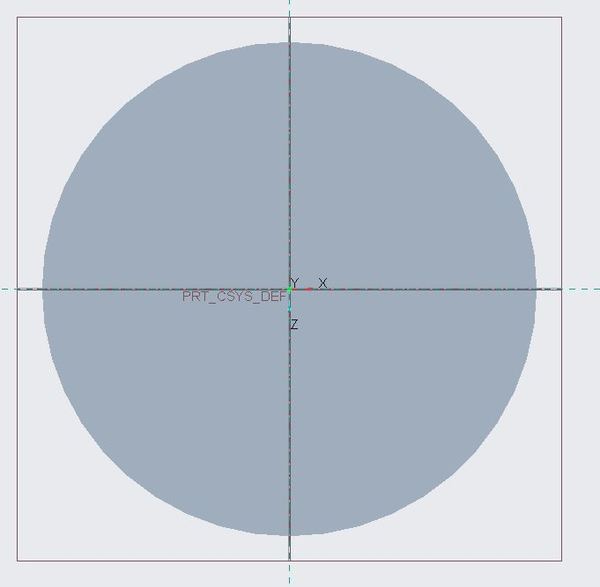
Click in the middle of the screen to place the sketch.
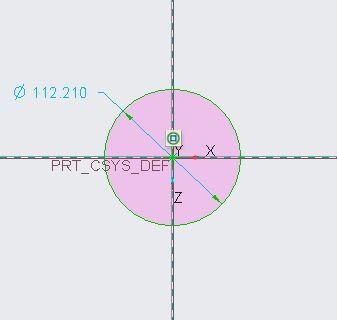
Move it to the center of the x-y reference lines by clicking the circle in the middle and dragging it to the origin.
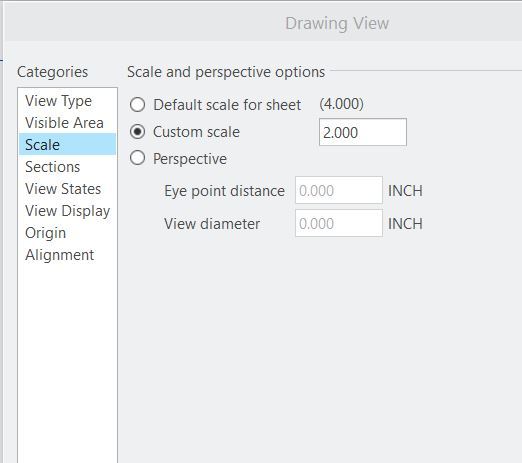
Up top on the bar, you can scale the image to 1.000. To the left of the green checkmark you should see a white box. Put 1.000 in this box, and then click the green checkmark.
Now press OK again.
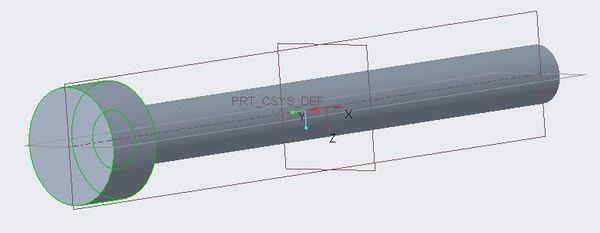
Hold down the middle mouse button (or scroll wheel) while moving your wrist in order to rotate the object and see it in three dimensions.
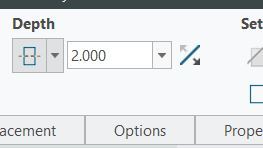
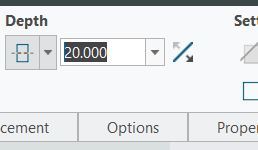
Change the Depth to 2.000.
Click OK.
Save it by going to File -> Save or clicking the Save icon at the top-left of the window.
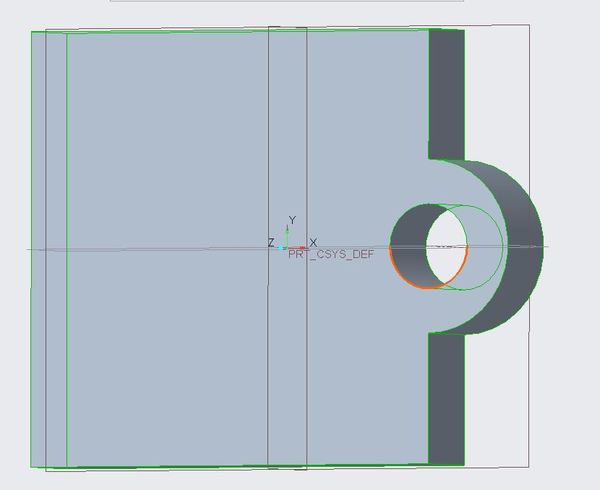
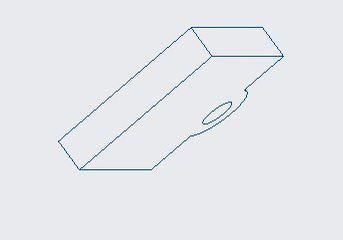
To examine the dimensions of the part, click on Extrude 1 on the left side of the window.
Press Ctrl + E or click the Edit Definition button.
Click Placement -> Edit.
Click the Sketch View icon on the small toolbar to flatten the sketch. You can see the dimensions.
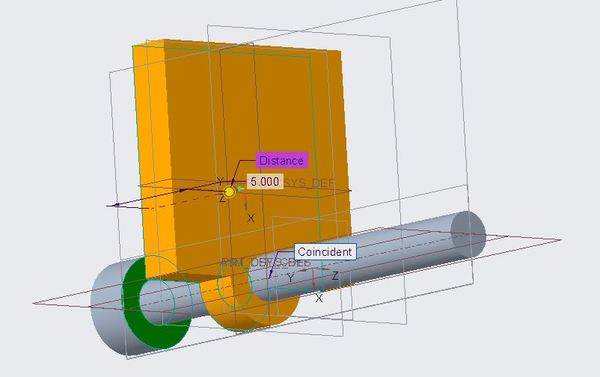
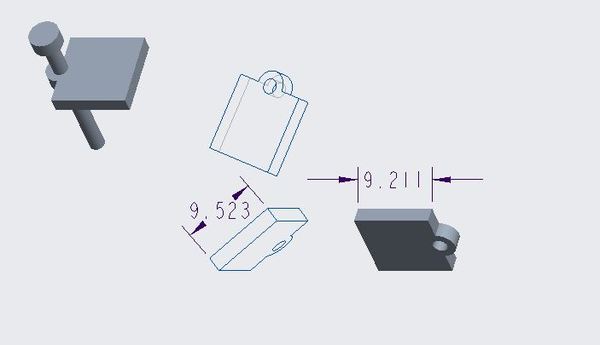
Mechanisms in Creo Parametric enable cool animations.
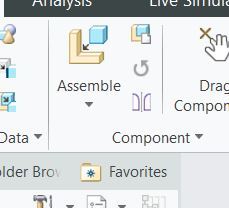
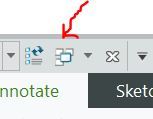
At the top-left of your window, there is a small arrow that enables you to change windows. Go to the assembly .ASM file.
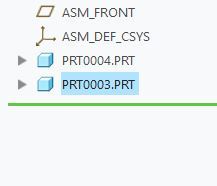
On the left-hand side, select the circle-rectangle plate part, and click the Edit Definition icon (or type Ctrl+E).
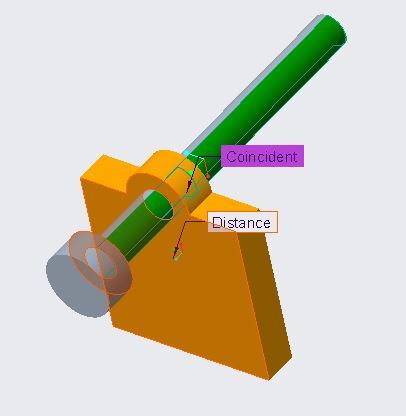
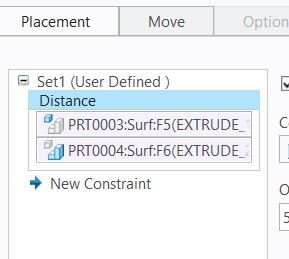
Click Placement.
Right-click on Coincident.
Click Delete.
Right Click on Distance.
Click Delete.
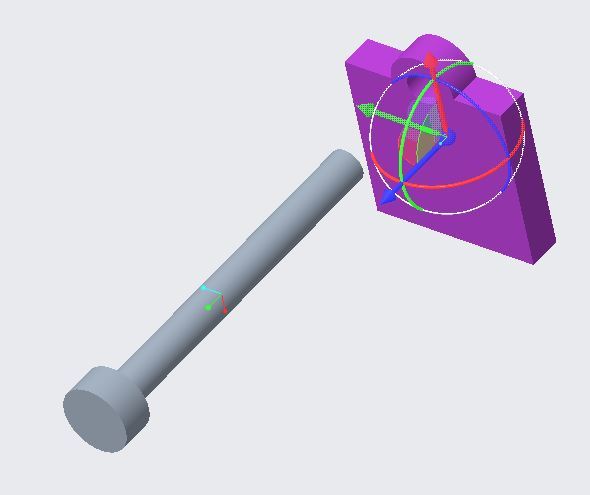
Go to User Defined dropdown menu, and Select Pin.
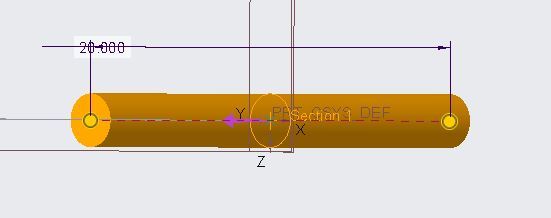
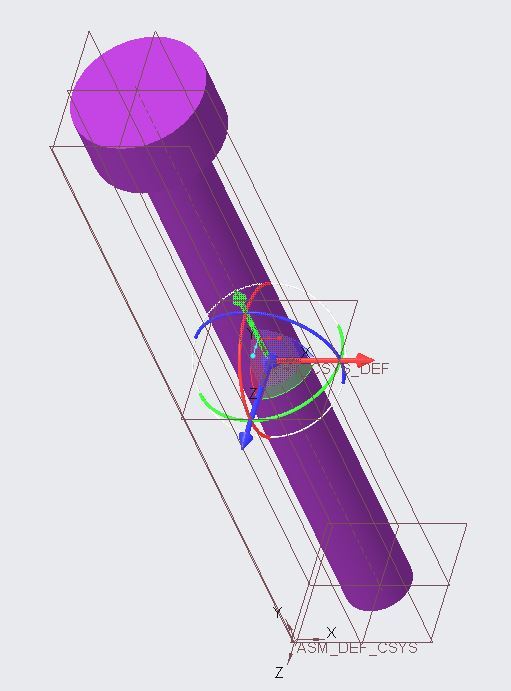
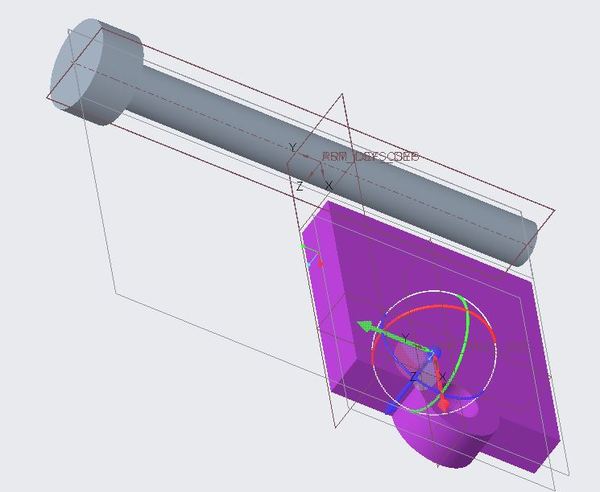
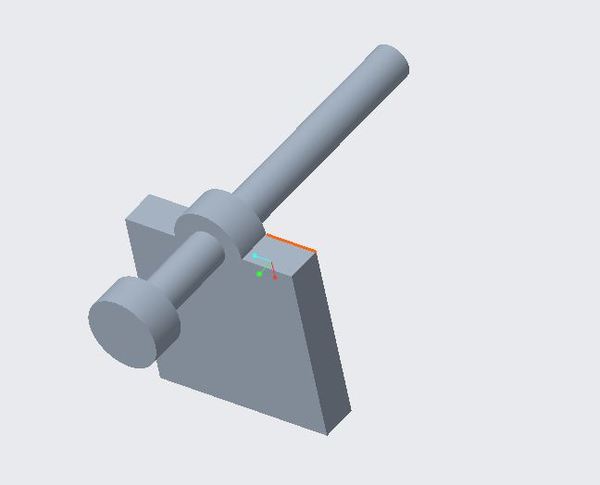
Click the arrow on the circle-rectangle plate that is parallel to the nail and hold down your mouse.
Slide the plate off the nail.
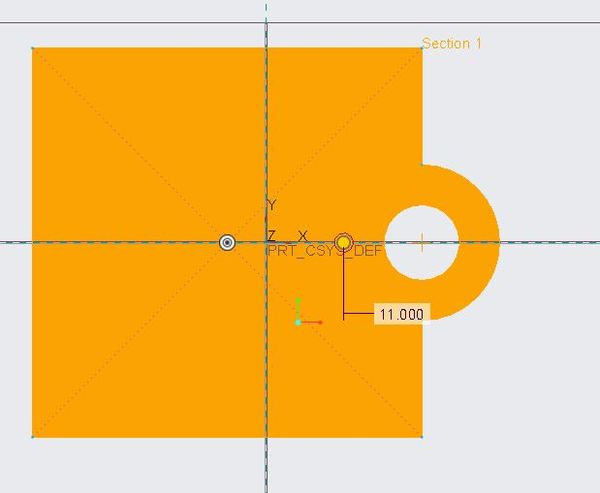
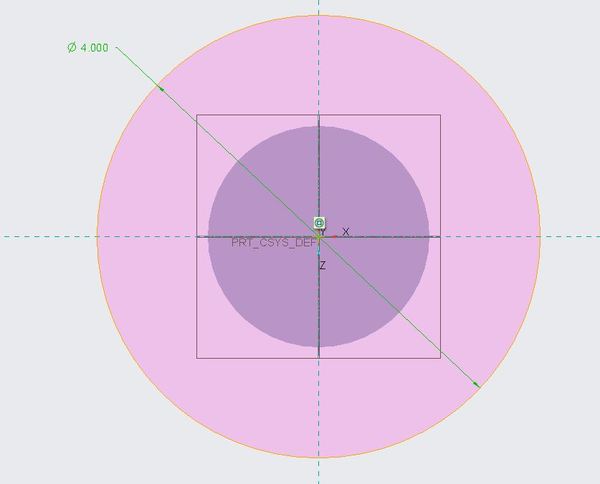
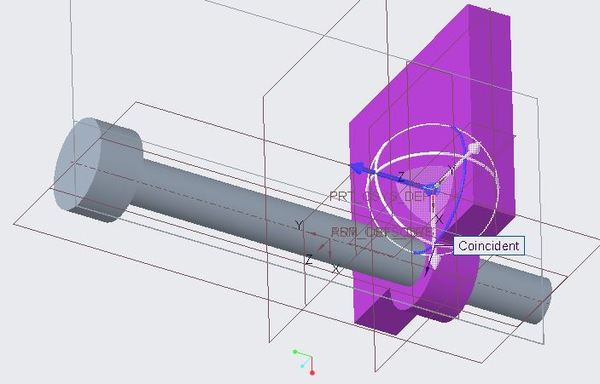
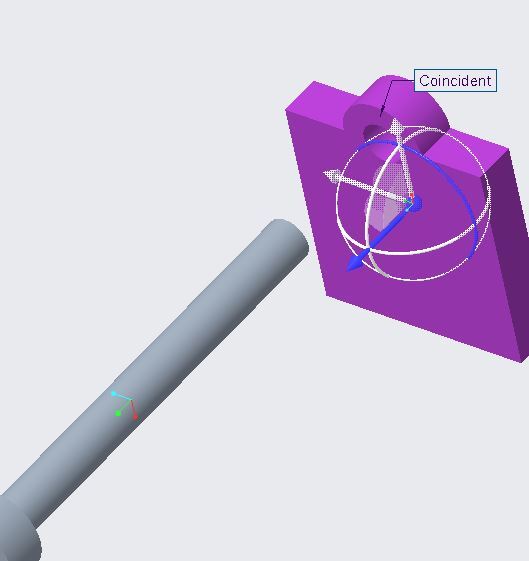
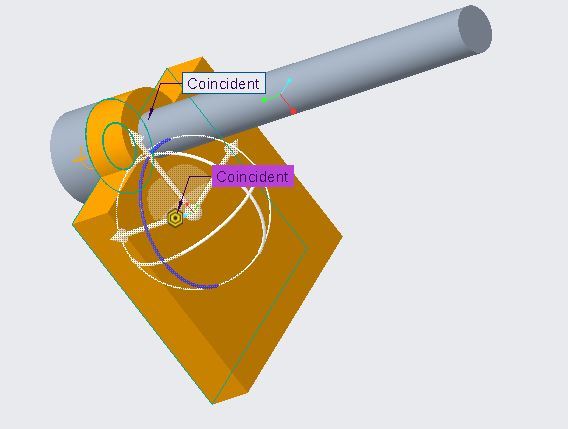
Click the interior hole of the circle-plate combination.
Drag the cursor to a point on the nail cylinder (i.e. shaft). We have now connected the two surfaces.
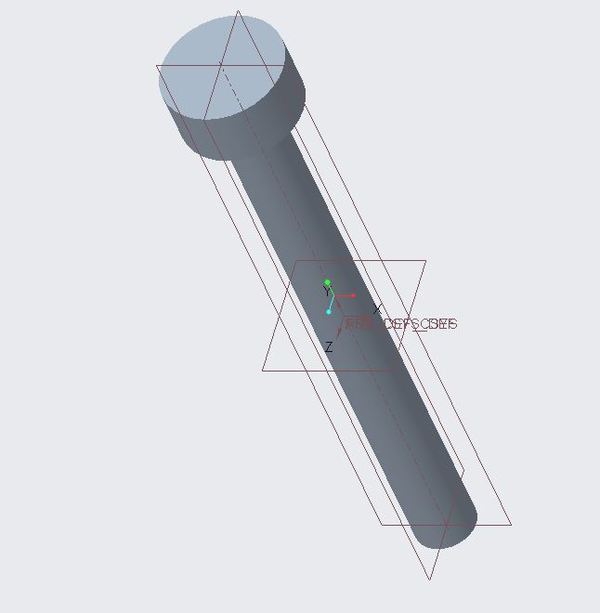
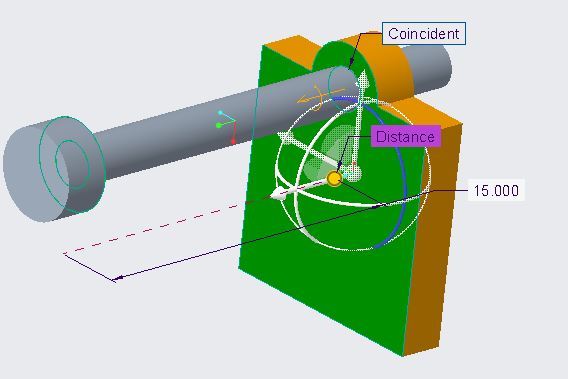
Now click on the flat part of the circle-rectangle plate, and connect that surface to the surface of the nail head that faces the plate.
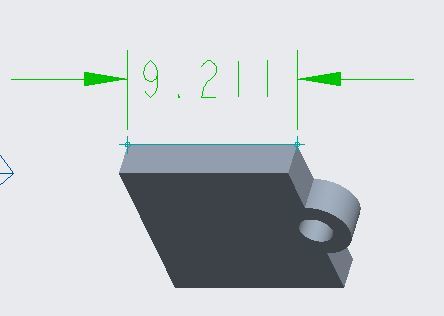
In the dropdown menu, select Distance.
Change Distance to 20.000.
Now change to 15.000.
Click OK (the green check).
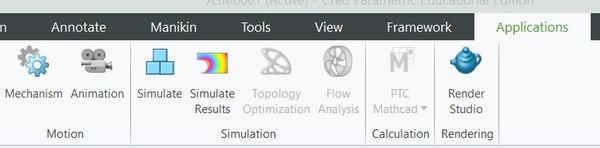
Click the Applications tab.
Click Mechanism.
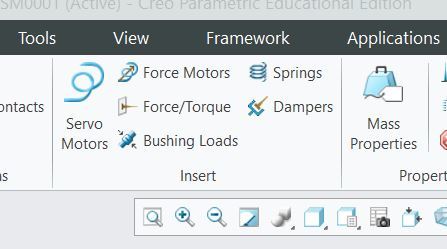
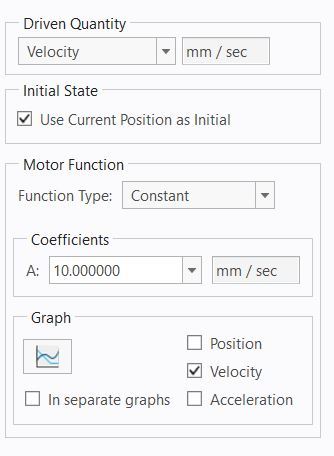
Click the Servo Motors tab.
Click Profile Details.
Select Velocity in the dropdown menu.
Change Velocity to 10 mm/sec.
Now click on the part.
Press OK.
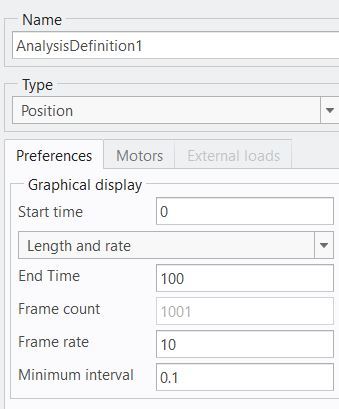
Click on Mechanism Analysis.
Change End Time to 100.
Click Run to run the animation. Here is what you should see:
You can exit when you want to.
Regenerate the model in order to rebuild the changes you have just made.
Click Save.
You can exit the software.
That’s it!
What I have shown you is a quick taste of some of the things Creo Parametric enables you to do. There is much more functionality than what we’ve gone through, but you now have experience with the basics.