Below I will show you how to estimate a normalized histogram for a 3D image.
In image processing, a histogram shows the number of pixels (or voxels in the case of a 3D image) for each intensity value in a given image.
Let us suppose we have a 3D image
that is 512 x 512 x 512 (width x height x depth). This image has 134,217,728 voxels
(i.e. 5123).
If we assume the image is grayscale with 256 distinct intensity levels i (where i = 0 [black], 1, 2, …. 253, 254, 255 [white]), the probability p that a voxel chosen at random will have an intensity level i is as follows:
Note that there will be a different probability p for each
intensity value of i. For this reason, the i on pi is subscripted.
Let h(i) represent the normalized histogram where h is the count and i is the intensity value. Let K represent the total number of possible intensity values (e.g. 256). The general equation for the normalized histogram is as follows:
Here is the pseudocode for estimating a normalized histogram of a given 3D image of size 5123 with 256 intensity levels:
// Create the initial unnormalized histogram.
// Initialize all values to 0
for (i = 0; i < 256; i++) {
h(i) = 0;
}
// Traverse each voxel in the image and keep
// a count of the number of times an intensity
// value i appeared.
// w means width, h means height, and d means depth.
for (w = 0; w < 512; w++) {
for (h = 0; h < 512; h++) {
for (d = 0; d < 512; d++) {
// Extract the intensity value for the voxel
i = image[w][h][d];
// Update the histogram for the intensity
// value found above
h(i) = h(i) + 1;
}
}
}
// Now that we have the unnormalized histogram, we have
// to normalize it by dividing each value of the
// histogram by the total number of pixels in the image.
for (i = 0; i < 256; i++) {
h(i) = h(i) / (5123)
}
The sum of all the components in the normalized histogram above is equal to 1.
*** This tutorial is two years old and may no longer work properly. You can find an updated tutorial for object recognition at this link***
In this tutorial, we will develop a program that can recognize objects in a real-time video stream on a built-in laptop webcam using deep learning.
Object recognition involves two main
tasks:
Object Detection (Where are the objects?): Locate objects in a photo or video frame
Image Classification (What are the objects?): Predict the type of each object in a photo or video frame
Humans can do both tasks effortlessly, but computers cannot.
Computers require a lot of processing power to take full advantage of the state-of-the-art algorithms that enable object recognition in real time. However, in recent years, the technology has matured, and real-time object recognition is now possible with only a laptop computer and a webcam.
Real-time object recognition systems
are currently being used in a number of real-world applications, including the
following:
Self-driving cars: detection of pedestrians, cars, traffic lights, bicycles, motorcycles, trees, sidewalks, etc.
Sports: ball tracking in baseball, golf, and football.
Agriculture: disease detection in fruits.
Food: food identification.
There are a lot of steps in this tutorial. Have fun, be patient, and be persistent. Don’t give up! If something doesn’t work the first time around, try again. You will learn a lot more by fighting through to the end of this project. Stay relentless!
By the end of this tutorial, you will have the rock-solid confidence to detect and recognize objects in real time on your laptop’s GPU (Graphics Processing Unit) using deep learning.
We need to get all the required software set up on our computer. I will be following this really helpful tutorial.
Open an Anaconda command prompt terminal.
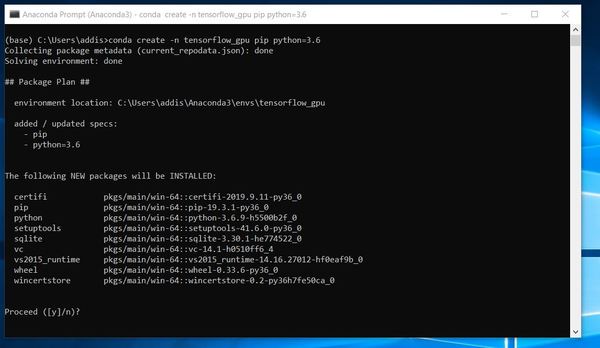
Type the command below to create a virtual environment named tensorflow_cpu that has Python 3.6 installed.
conda create -n tensorflow_cpu pip python=3.6
Press y and then ENTER.
A virtual environment is like an independent Python workspace which has its own set of libraries and Python version installed. For example, you might have a project that needs to run using an older version of Python, like Python 2.7. You might have another project that requires Python 3.7. You can create separate virtual environments for these projects.
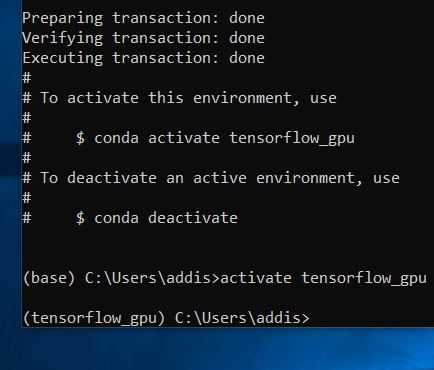
Now, let’s activate the virtual environment by using this command:
conda activate tensorflow_cpu
Type the following command to install TensorFlow CPU.
You should see a message that says: “Your CPU supports instructions that this TensorFlow binary….”. Just ignore that. Your TensorFlow will still run fine.
Now run this command to complete the test of the installation:
print(sess.run(hello))
Press CTRL+Z. Then press ENTER to exit.
Type:
exit
That’s it for TensorFlow CPU. Now let’s install TensorFlow GPU.
Here is a good tutorial that walks through the installation, but I’ll outline all the steps below.
Install CUDA Toolkit v9.0
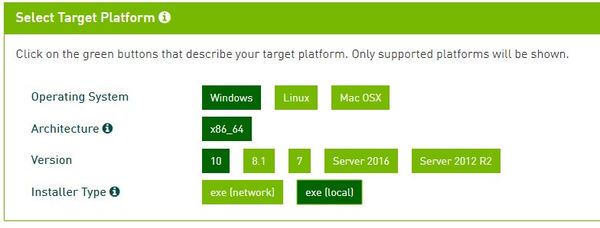
The first thing we need to do is to install the CUDA Toolkit v9.0. Go to this link.
Select your operating system. In my case, I will select Windows, x86_64, Version 10, and exe (local).
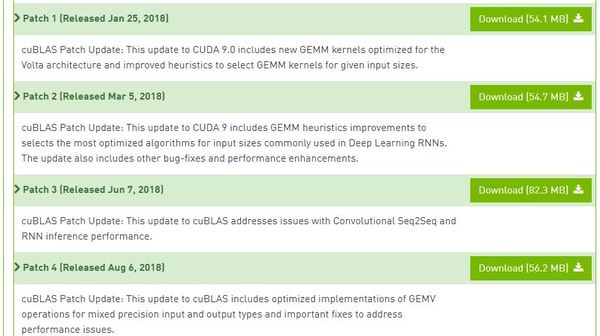
Download the Base Installer as well as all the patches. I downloaded all these files to my Desktop. It will take a while to download, so just wait while your computer downloads everything.
Open the folder where the downloads were saved to.
Double-click on the Base Installer program, the largest of the files that you downloaded from the website.
Click Yes to allow the program to make changes to your device.
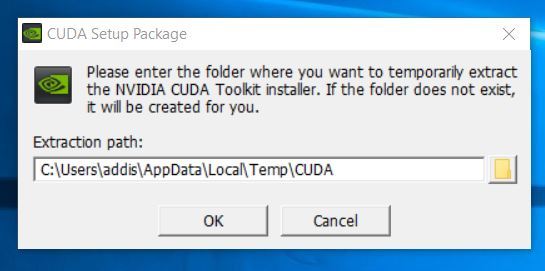
Click OK to extract the files to your computer.
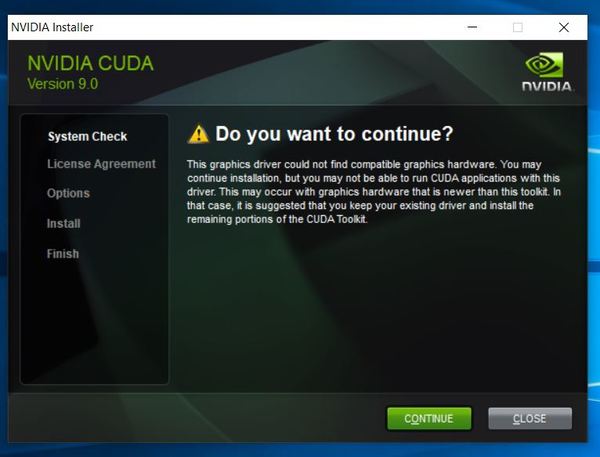
I saw this error window. Just click Continue.
Click Agree and Continue.
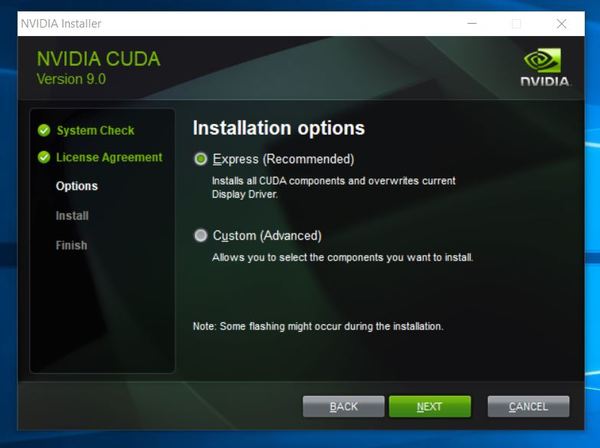
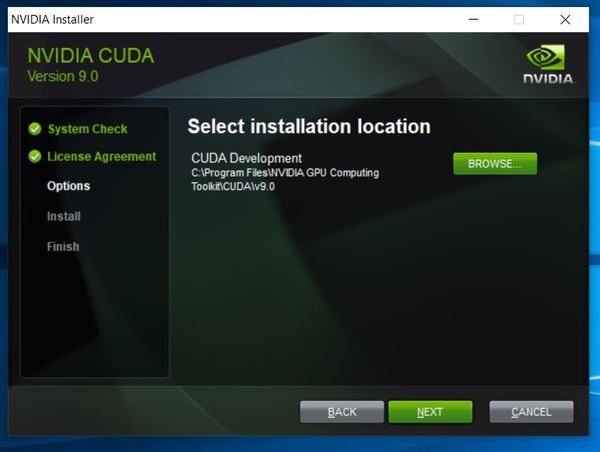
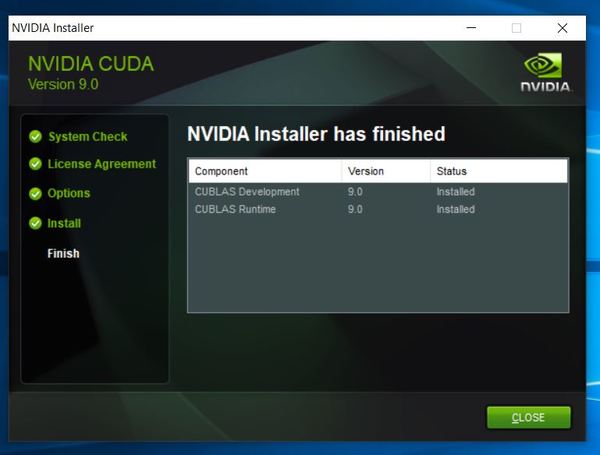
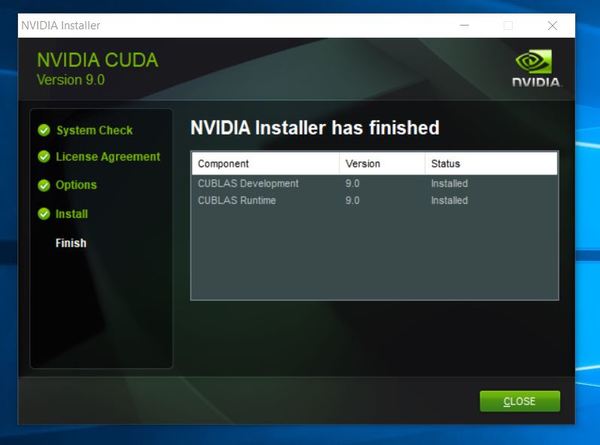
If you saw that error window earlier… “…you may not be able to run CUDA applications with this driver…,” select the Custom (Advanced) install option and click Next. Otherwise, do the Express installation and follow all the prompts.
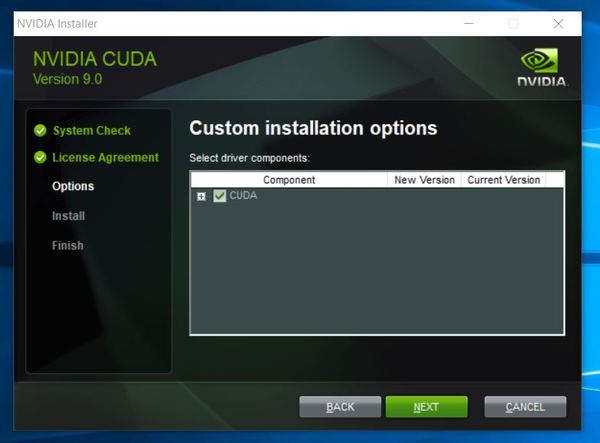
Uncheck the Driver components, PhysX, and Visual Studio Integration options. Then click Next.
Install the NVIDIA CUDA Deep Neural Network library (cuDNN)
Now that we installed the CUDA 9.0 base installer and its four patches, we need to install the NVIDIA CUDA Deep Neural Network library (cuDNN). Official instructions for installing are on this page, but I’ll walk you through the process below.
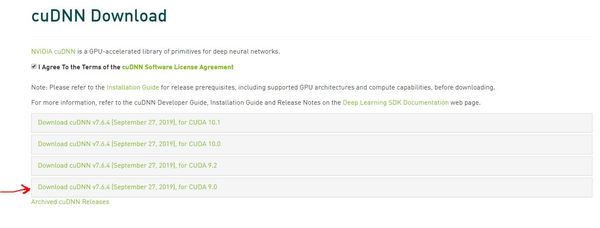
Agree to the terms of the cuDNN Software License Agreement.
We have CUDA 9.0, so we need to click cuDNN v7.6.4 (September 27, 2019), for CUDA 9.0.
I have Windows 10, so I will download cuDNN Library for Windows 10.
In my case, the zip file downloaded to my Desktop. I will unzip that zip file now, which will create a new folder of the same name…just without the .zip part. These are your cuDNN files. We’ll come back to these in a second.
Before we get going, let’s double check what GPU we have. If you are on a Windows machine, search for the “Device Manager.”
Once you have the Device Manager open, you should see an option near the top for “Display Adapters.” Click the drop-down arrow next to that, and you should see the name of your GPU. Mine is NVIDIA GeForce GTX 1060.
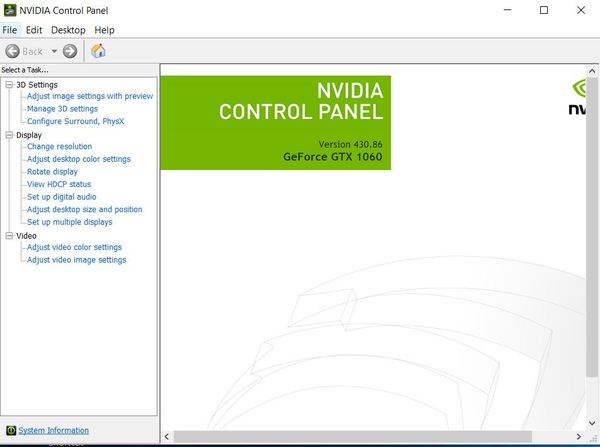
If you are on Windows, you can also check what NVIDIA graphics driver you have by right-clicking on your Desktop and clicking the NVIDIA Control Panel. My version is 430.86. This version fits the requirements for cuDNN.
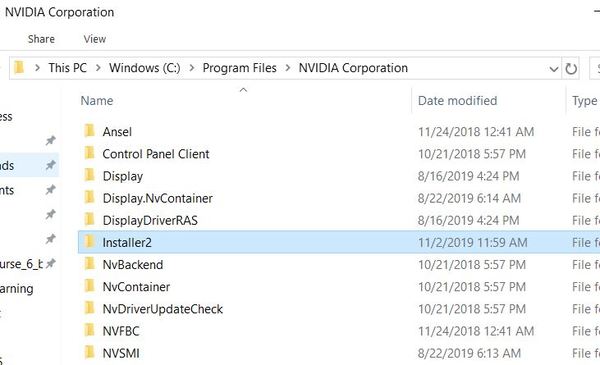
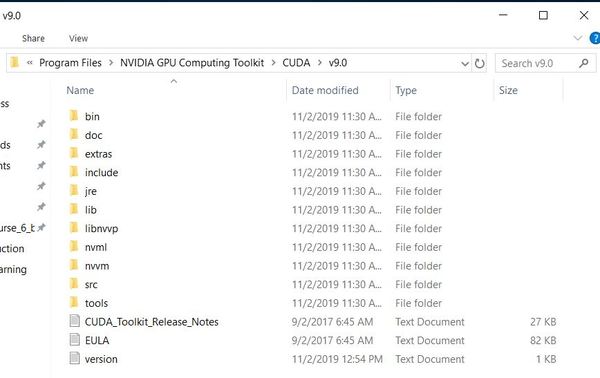
Ok, now that we have verified that our system meets the requirements, lets navigate to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0, your CUDA Toolkit directory.
Now go to your cuDNN files, that new folder that was created when you did the unzipping. Inside that folder, you should see a folder named cuda. Click on it.
Click bin.
Copy cudnn64_7.dll to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0\bin. Your computer might ask you to allow Administrative Privileges. Just click Continue when you see that prompt.
Now go back to your cuDNN files. Inside the cuda folder, click on include. You should see a file named cudnn.h.
Copy that file to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0\include. Your computer might ask you to allow Administrative Privileges. Just click Continue when you see that prompt.
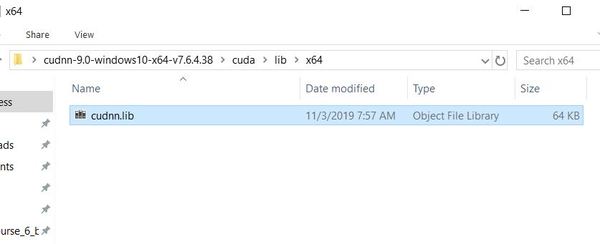
Now go back to your cuDNN files. Inside the cuda folder, click on lib -> x64. You should see a file named cudnn.lib.
Copy that file to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0\lib\x64. Your computer might ask you to allow Administrative Privileges. Just click Continue when you see that prompt.
If you are using Windows, do a search on your computer for Environment Variables. An option should pop up to allow you to edit the Environment Variables on your computer.
Click on Environment Variables.
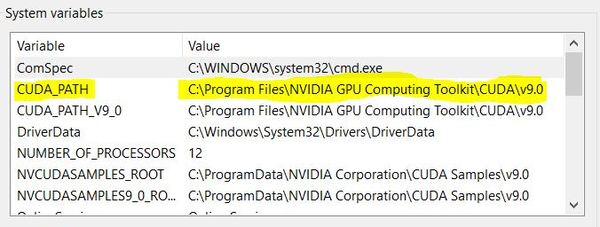
Make sure you CUDA_PATH variable is set to C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0.
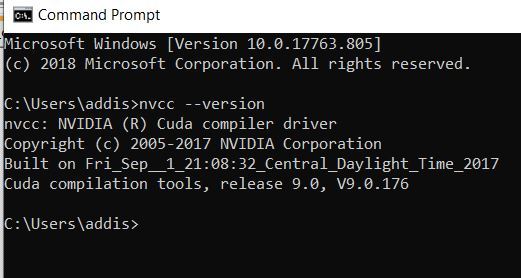
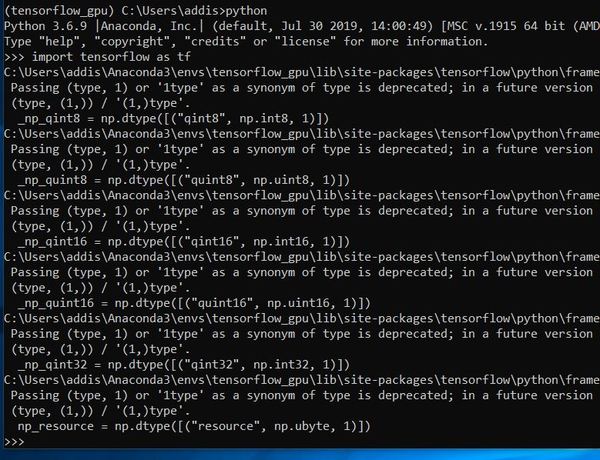
Now let’s test the installation. Launch the Python interpreter.
python
Type this command.
import tensorflow as tf
If you don’t see an error, TensorFlow GPU is successfully installed.
Now type this:
hello = tf.constant('Hello, TensorFlow!')
And run this command. It might take a few minutes to run, so just wait until it finishes:
sess = tf.Session()
Now type this command to complete the test of the installation:
print(sess.run(hello))
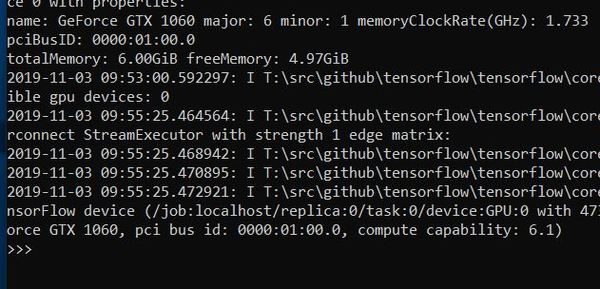
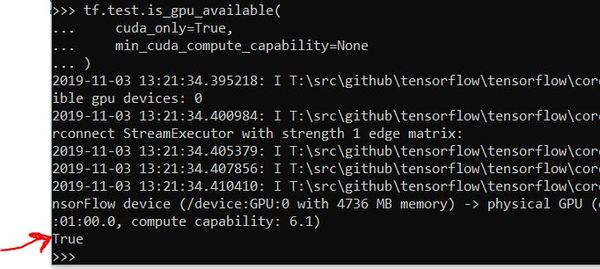
You can further confirm whether TensorFlow can access the GPU, by typing the following into the Python interpreter (just copy and paste into the terminal window while the Python interpreter is running).
Now that we have everything setup, let’s install some useful libraries. I will show you the steps for doing this in my TensorFlow GPU virtual environment, but the steps are the same for the TensorFlow CPU virtual environment.
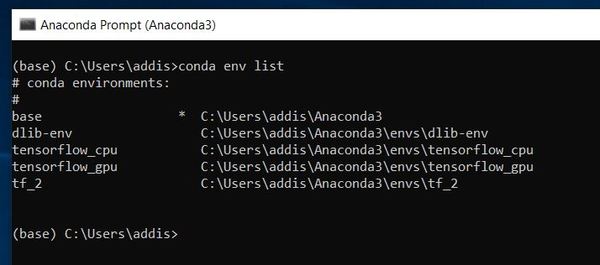
Open a new Anaconda terminal window. Let’s take a look at the list of virtual environments that we can activate.
conda env list
I’m going to activate the TensorFlow GPU virtual environment.
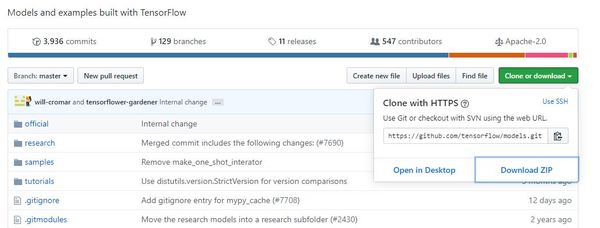
Once that is finished, you need to create a folder somewhere that has the TensorFlow Models (e.g. C:\Users\addis\Documents\TensorFlow). If you have a D drive, you can also save it there as well.
In your Anaconda terminal window, move to the TensorFlow directory you just created. You will use the cd command to change to that directory. For example:
Download the latest *-win32.zip release (assuming you are on a Windows machine).
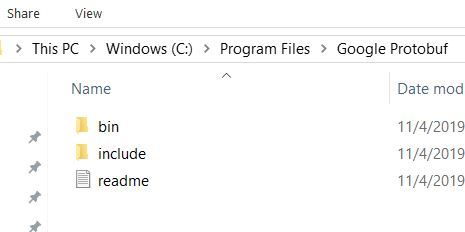
Create a folder in C:\Program Files named it Google Protobuf.
Extract the contents of the downloaded *-win32.zip, inside C:\Program Files\Google Protobuf
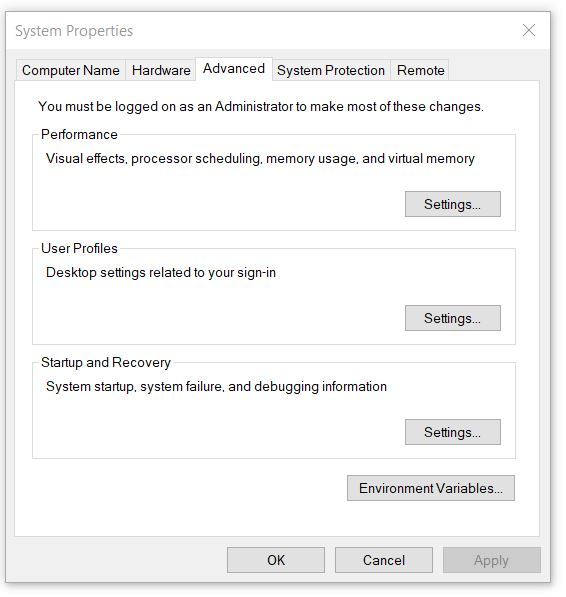
Search for Environment Variables on your system. A window should pop up that says System Properties.
Click Environment Variables.
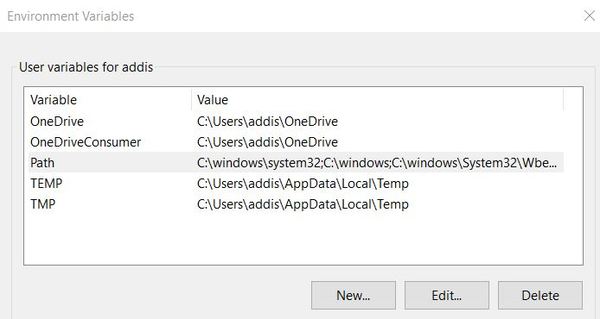
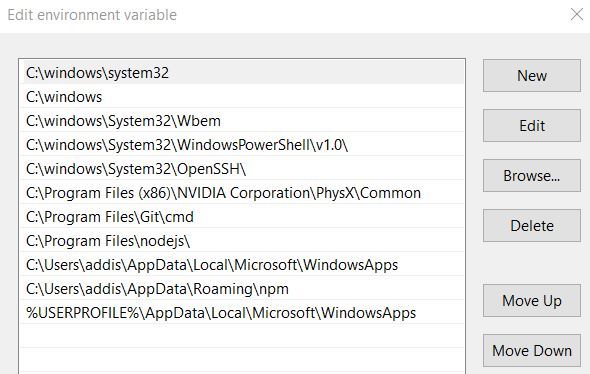
Go down to the Path variable and click Edit.
Click New.
Add C:\Program Files\Google Protobuf\bin
You can also add it the Path System variable.
Click OK a few times to close out all the windows.
Open a new Anaconda terminal window.
I’m going to activate the TensorFlow GPU virtual environment.
conda activate tensorflow_gpu
cd into your \TensorFlow\models\research\ directory and run the following command:
for /f %i in ('dir /b object_detection\protos\*.proto') do protoc object_detection\protos\%i --python_out=.
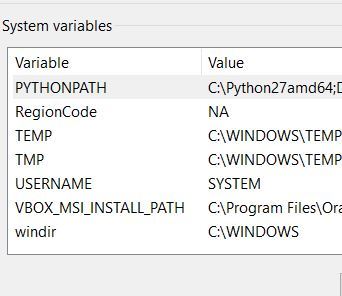
Now go back to the Environment Variables on your system. Create a New Environment Variable named PYTHONPATH (if you don’t have one already). Replace C:\Python27amd64 if you don’t have Python installed there. Also, replace <your_path> with the path to your TensorFlow folder.
Note: This section gets really technical. If you know the basics of computer vision and deep learning, it will make sense. Otherwise, it will not. You can skip this section and head straight to the Implementation section if you are not interested in what is going on under the hood of the object recognition application we are developing.
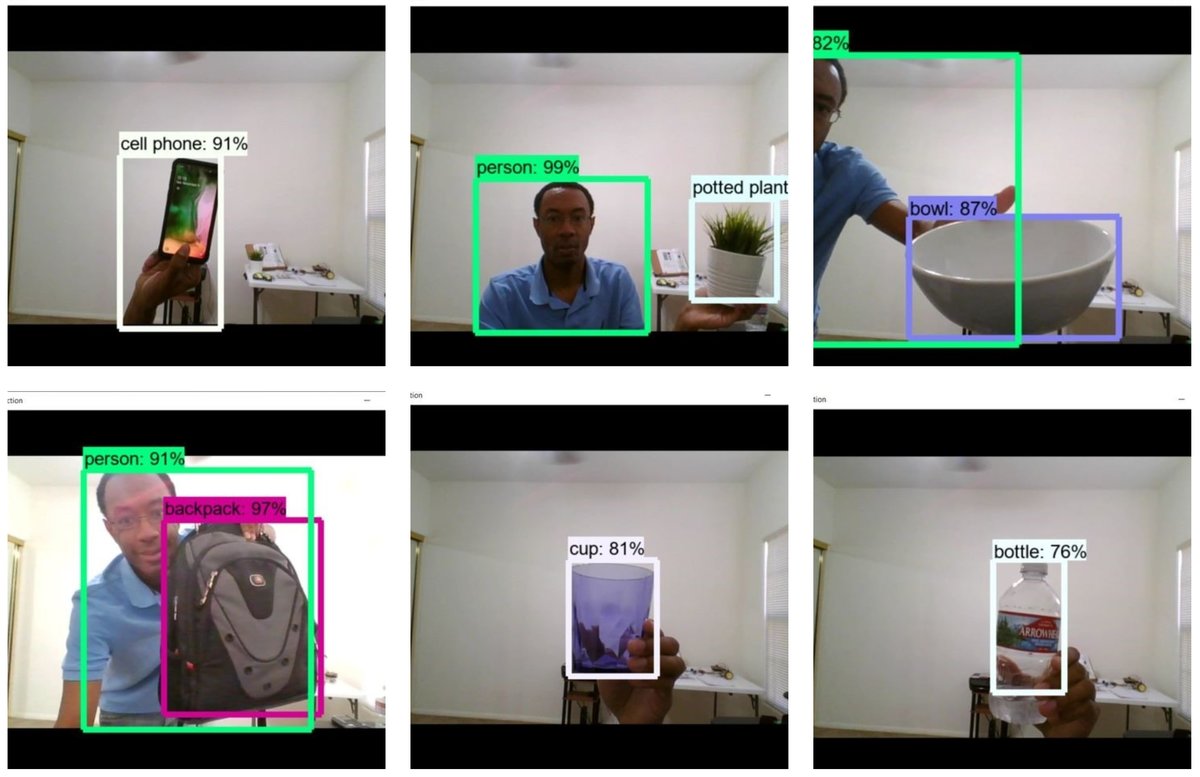
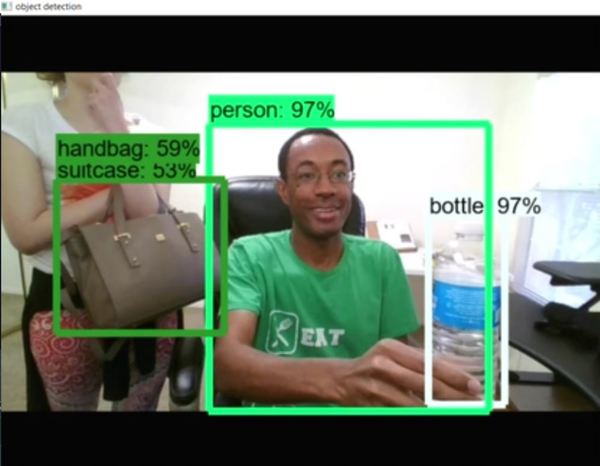
In this project, we use OpenCV and TensorFlow to create a system capable of automatically recognizing objects in a webcam. Each detected object is outlined with a bounding box labeled with the predicted object type as well as a detection score.
The detection score is the probability that a bounding box contains the object of a particular type (e.g. the confidence a model has that an object identified as a “backpack” is actually a backpack).
The particular SSD with Inception v2
model used in this project is the ssd_inception_v2_coco model. The ssd_inception_v2_coco model uses
the Single Shot MultiBox Detector (SSD) for its architecture and the Inception
v2 framework for feature extraction.
Single Shot MultiBox Detector (SSD)
Most state-of-the-art object detection methods involve the
following stages:
Hypothesize
bounding boxes
Resample
pixels or features for each box
Apply
a classifier
The Single Shot MultiBox Detector (SSD) eliminates the multi-stage process above and performs all object detection computations using just a single deep neural network.
Inception v2
Most state-of-the-art object detection
methods based on convolutional neural networks at the time of the invention of
Inception v2 added increasingly more convolution layers or neurons per layer in
order to achieve greater accuracy. The problem with this approach is that it is
computationally expensive and prone to overfitting. The Inception v2
architecture (as well as the Inception v3 architecture) was proposed in order
to address these shortcomings.
Rather than stacking multiple kernel
filter sizes sequentially within a convolutional neural network, the approach
of the inception-based model is to perform a convolution on an input with
multiple kernels all operating at the same layer of the network. By factorizing
convolutions and using aggressive regularization, the authors were able to
improve computational efficiency. Inception v2 factorizes the traditional 7 x 7
convolution into 3 x 3 convolutions.
Szegedy, Vanhoucke, Ioffe, Shlens, & Wojna, (2015) conducted an empirically-based demonstration in their landmark Inception v2 paper, which showed that factorizing convolutions and using aggressive dimensionality reduction can substantially lower computational cost while maintaining accuracy.
Data Set
The ssd_inception_v2_coco model used in this project is pretrained on the Common Objects in Context (COCO) data set (COCO data set), a large-scale data set that contains 1.5 million object instances and more than 200,000 labeled images. The COCO data required 70,000 crowd worker hours to gather, annotate, and organize images of objects in natural environments.
Software Dependencies
The
following libraries form the object recognition backbone of the application
implemented in this project:
OpenCV, a library of programming functions for computer vision.
Pillow, a library for manipulating images.
Numpy, a library for scientific computing.
Matplotlib, a library for creating graphs and visualizations.
TensorFlow Object Detection API, an open source framework developed by Google that enables the development, training, and deployment of pre-trained object detection models.
Now to the fun part, we will now recognize objects using our computer webcam.
Copy the following program, and save it to your TensorFlow\models\research\object_detection directory as object_detection_test.py .
# Import all the key libraries
import numpy as np
import os
import six.moves.urllib as urllib
import sys
import tarfile
import tensorflow as tf
import zipfile
import cv2
from collections import defaultdict
from io import StringIO
from matplotlib import pyplot as plt
from PIL import Image
from utils import label_map_util
from utils import visualization_utils as vis_util
# Define the video stream
cap = cv2.VideoCapture(0)
# Which model are we downloading?
# The models are listed here: https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/detection_model_zoo.md
MODEL_NAME = 'ssd_inception_v2_coco_2018_01_28'
MODEL_FILE = MODEL_NAME + '.tar.gz'
DOWNLOAD_BASE = 'http://download.tensorflow.org/models/object_detection/'
# Path to the frozen detection graph.
# This is the actual model that is used for the object detection.
PATH_TO_CKPT = MODEL_NAME + '/frozen_inference_graph.pb'
# List of the strings that is used to add the correct label for each box.
PATH_TO_LABELS = os.path.join('data', 'mscoco_label_map.pbtxt')
# Number of classes to detect
NUM_CLASSES = 90
# Download Model
opener = urllib.request.URLopener()
opener.retrieve(DOWNLOAD_BASE + MODEL_FILE, MODEL_FILE)
tar_file = tarfile.open(MODEL_FILE)
for file in tar_file.getmembers():
file_name = os.path.basename(file.name)
if 'frozen_inference_graph.pb' in file_name:
tar_file.extract(file, os.getcwd())
# Load a (frozen) Tensorflow model into memory.
detection_graph = tf.Graph()
with detection_graph.as_default():
od_graph_def = tf.GraphDef()
with tf.gfile.GFile(PATH_TO_CKPT, 'rb') as fid:
serialized_graph = fid.read()
od_graph_def.ParseFromString(serialized_graph)
tf.import_graph_def(od_graph_def, name='')
# Loading label map
# Label maps map indices to category names, so that when our convolution network
# predicts `5`, we know that this corresponds to `airplane`. Here we use internal
# utility functions, but anything that returns a dictionary mapping integers to
# appropriate string labels would be fine
label_map = label_map_util.load_labelmap(PATH_TO_LABELS)
categories = label_map_util.convert_label_map_to_categories(
label_map, max_num_classes=NUM_CLASSES, use_display_name=True)
category_index = label_map_util.create_category_index(categories)
# Helper code
def load_image_into_numpy_array(image):
(im_width, im_height) = image.size
return np.array(image.getdata()).reshape(
(im_height, im_width, 3)).astype(np.uint8)
# Detection
with detection_graph.as_default():
with tf.Session(graph=detection_graph) as sess:
while True:
# Read frame from camera
ret, image_np = cap.read()
# Expand dimensions since the model expects images to have shape: [1, None, None, 3]
image_np_expanded = np.expand_dims(image_np, axis=0)
# Extract image tensor
image_tensor = detection_graph.get_tensor_by_name('image_tensor:0')
# Extract detection boxes
boxes = detection_graph.get_tensor_by_name('detection_boxes:0')
# Extract detection scores
scores = detection_graph.get_tensor_by_name('detection_scores:0')
# Extract detection classes
classes = detection_graph.get_tensor_by_name('detection_classes:0')
# Extract number of detectionsd
num_detections = detection_graph.get_tensor_by_name(
'num_detections:0')
# Actual detection.
(boxes, scores, classes, num_detections) = sess.run(
[boxes, scores, classes, num_detections],
feed_dict={image_tensor: image_np_expanded})
# Visualization of the results of a detection.
vis_util.visualize_boxes_and_labels_on_image_array(
image_np,
np.squeeze(boxes),
np.squeeze(classes).astype(np.int32),
np.squeeze(scores),
category_index,
use_normalized_coordinates=True,
line_thickness=8)
# Display output
cv2.imshow('object detection', cv2.resize(image_np, (800, 600)))
if cv2.waitKey(25) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
print("We are finished! That was fun!")
Open a new terminal window.
Activate the TensorFlow GPU virtual environment.
conda activate tensorflow_gpu
cd into your TensorFlow\models\research\object_detection directory.
At the time of this writing, we need to use Numpy version 1.16.4. Type the following command to see what version of Numpy you have on your system.
pip show numpy
If it is not 1.16.4, execute the following commands:
pip uninstall numpy
pip install numpy==1.16.4
Now run, your program:
python object_detection_test.py
In about 30 to 90 seconds, you should see your webcam power up and object recognition take action. That’s it! Congratulations for making it to the end of this tutorial!
What is the Difference Between Mathematical Morphology Filters and Convolution Filters?
Answer: Linearity
Convolution filters generate output images in which the brightness value at a particular pixel depends on the weighted sum (i.e. linearcombination) of the brightness of the neighboring pixels.
Mathematical morphology filters on the other hand perform nonlinear processing on images. These filters depend only on the relative ordering of pixel values as opposed to their numerical values. This property of mathematical morphology filters makes them really good when applied to binary images (a digital image that can only have two possible values for each pixel).
Types of Convolution and Mathematical Morphology Filters