

In this tutorial, I will show you my setup for an obstacle avoiding robot that has two DC motors and uses Arduino as its “brain”.
Here is the motor I am working with, but you can use any motor that looks like this one.

Real-World Applications
This project has a number of real-world applications:
- Indoor Delivery Robots
- Robot Vacuums
- Factories
Prerequisites
- You have the Arduino IDE (Integrated Development Environment) installed on either your PC (Windows, MacOS, or Linux).
- You have completed my tutorial, “How to Connect DC Motors to Arduino and the L298N.”
- You have a robot that runs on DC motors. My robot consists of pieces I took from the Osoyoo self-balancing robot car kit (which contains the 12V 333 RPM JGB37-520B motor with wheels.) and I also am using the caster wheel from this two wheel drive robot kit.
- I won’t teach how to put all the parts together in this tutorial, so it is helpful if you have built a basic wheeled robot before.
You Will Need
In addition to the parts listed in the article I linked to in the Prerequisites, you will need the following components (#ad).
- HC-SR04 Ultrasonic Distance Sensor (for detecting obstacles)
- VELCRO Brand Mounting Squares – 7/8 Inch (for mounting the ultrasonic sensor)
- Multicolor Jumper Wire for Breadboard 10cm (for connecting the ultrasonic sensor to the Arduino).
Disclosure (#ad): As an Amazon Associate I earn from qualifying purchases.
Set Up the HC-SR04 Ultrasonic Distance Sensor
The first thing we need to do is set up the hardware. Here is the wiring diagram:
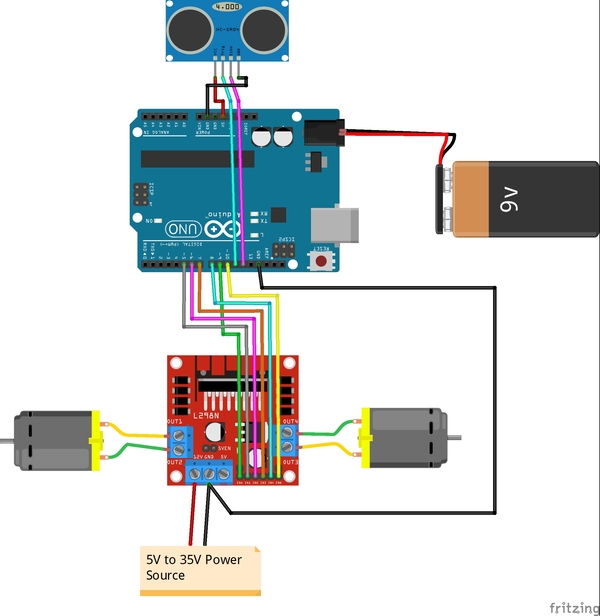
- VCC on the sensor connects to 5V on the Arduino
- Echo on the sensor connects to Digital Pin 12 on the Arduino
- Trig (stands for trigger) on the sensor connects to Digital Pin 11 on the Arduino
- GND (stands for Ground) on the sensor connects to GND on the Arduino
Test the Ultrasonic Distance Sensor
Now, upload the following sketch to the Arduino to test the ultrasonic sensor. I named my program test_ultrasonic_distance_sensor.ino.
/**
* This program tests the ultrasonic
* distance sensor
*
* @author Addison Sears-Collins
* @version 2.0 2021-04-11
*/
/* Give a name to a constant value before
* the program is compiled. The compiler will
* replace references to Trigger and Echo with
* 11 and 12, respectively, at compile time.
* These defined constants don't take up
* memory space on the Arduino.
*/
#define Trigger 11
#define Echo 12
/*
* This setup code is run only once, when
* Arudino is supplied with power.
*/
void setup(){
// Set the baud rate to 9600. 9600 means that
// the serial port is capable of transferring
// a maximum of 9600 bits per second.
Serial.begin(9600);
// Define each pin as an input or output.
pinMode(Echo, INPUT);
pinMode(Trigger, OUTPUT);
}
void loop(){
// Make the Trigger LOW (0 volts)
// for 2 microseconds
digitalWrite(Trigger, LOW);
delayMicroseconds(2);
// Emit high frequency 40kHz sound pulse
// (i.e. pull the Trigger)
// by making Trigger HIGH (5 volts)
// for 10 microseconds
digitalWrite(Trigger, HIGH);
delayMicroseconds(10);
digitalWrite(Trigger, LOW);
// Detect a pulse on the Echo pin 8.
// pulseIn() measures the time in
// microseconds until the sound pulse
// returns back to the sensor.
int distance = pulseIn(Echo, HIGH);
// Speed of sound is:
// 13511.811023622 inches per second
// 13511.811023622/10^6 inches per microsecond
// 0.013511811 inches per microsecond
// Taking the reciprocal, we have:
// 74.00932414 microseconds per inch
// Below, we convert microseconds to inches by
// dividing by 74 and then dividing by 2
// to account for the roundtrip time.
distance = distance / 74 / 2;
// Print the distance in inches
Serial.println(distance);
// Pause for 100 milliseconds
delay(100);
}
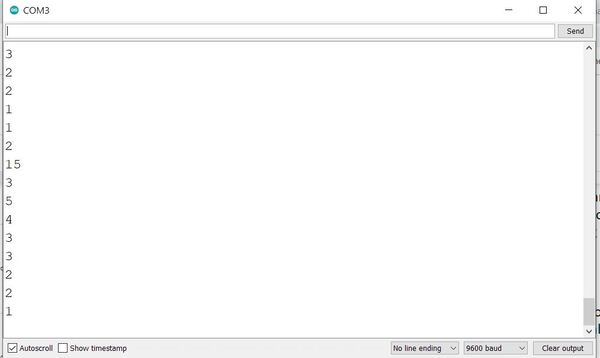
As soon as uploading is finished and with the USB cable still connected to the Arduino, click on the green magnifying glass in the upper right of the IDE to open the Serial Monitor.
Make sure you have the following settings:
- Autoscroll: selected
- Line ending: No Line ending
- Baud: 9600 baud
Place any object in front of the sensor and move it back and forth. You should see the readings on the Serial Monitor change accordingly.
Code for Obstacle Avoidance
Now, upload the following sketch to your Arduino. I named my program obstacle_avoiding_robot_l298n.ino.
/**
* This robot avoids obstacles
* using an ultrasonic sensor.
*
* @author Addison Sears-Collins
* @version 1.0 2021-04-11
*/
// Motor A connections
const int enA = 9;
const int in1 = 5;
const int in2 = 6;
// Motor B connections
const int enB = 10;
const int in3 = 7;
const int in4 = 8;
// Set the speed (0 = off and 255 = max speed)
// If your wheels are not moving, check your connections,
// or increase the speed.
const int motorSpeed = 80;
/* Give a name to a constant value before
* the program is compiled. The compiler will
* replace references to Trigger and Echo with
* 11 and 12, respectively, at compile time.
* These defined constants don't take up
* memory space on the Arduino.
*/
#define Trigger 11
#define Echo 12
/*
* This setup code is run only once, when
* Arudino is supplied with power.
*/
void setup(){
// Set the baud rate to 9600. 9600 means that
// the serial port is capable of transferring
// a maximum of 9600 bits per second.
//Serial.begin(9600);
// Motor control pins are outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// Turn off motors - Initial state
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
// Set the motor speed
analogWrite(enA, motorSpeed);
analogWrite(enB, motorSpeed);
// Define each pin as an input or output.
pinMode(Echo, INPUT);
pinMode(Trigger, OUTPUT);
// Initializes the pseudo-random number generator
// Needed for the robot to wander around the room
randomSeed(analogRead(3));
delay(200); // Pause 200 milliseconds
go_forward(); // Go forward
}
/*
* This is the main code that runs again and again while
* the Arduino is connected to power.
*/
void loop(){
int distance = doPing();
// If obstacle <= 16 inches away
if (distance >= 0 && distance <= 16) {
//Serial.println("Obstacle detected ahead");
go_backwards(); // Move in reverse
delay(2000);
/* Go left or right to avoid the obstacle*/
if (random(2) == 0) { // Generates 0 or 1, randomly
go_right(); // Turn right
}
else {
go_left(); // Turn left
}
delay(3000);
go_forward(); // Move forward
}
delay(50); // Wait 50 milliseconds before pinging again
}
/*
* Returns the distance to the obstacle as an integer
*/
int doPing () {
int distance = 0;
int average = 0;
// Grab four measurements of distance and calculate
// the average.
for (int i = 0; i < 4; i++) {
// Make the Trigger LOW (0 volts)
// for 2 microseconds
digitalWrite(Trigger, LOW);
delayMicroseconds(2);
// Emit high frequency 40kHz sound pulse
// (i.e. pull the Trigger)
// by making Trigger HIGH (5 volts)
// for 10 microseconds
digitalWrite(Trigger, HIGH);
delayMicroseconds(10);
digitalWrite(Trigger, LOW);
// Detect a pulse on the Echo pin 8.
// pulseIn() measures the time in
// microseconds until the sound pulse
// returns back to the sensor.
distance = pulseIn(Echo, HIGH);
// Speed of sound is:
// 13511.811023622 inches per second
// 13511.811023622/10^6 inches per microsecond
// 0.013511811 inches per microsecond
// Taking the reciprocal, we have:
// 74.00932414 microseconds per inch
// Below, we convert microseconds to inches by
// dividing by 74 and then dividing by 2
// to account for the roundtrip time.
distance = distance / 74 / 2;
// Compute running sum
average += distance;
// Wait 10 milliseconds between pings
delay(10);
}
// Return the average of the four distance
// measurements
return (average / 4);
}
/*
* Forwards, backwards, right, left, stop.
*/
void go_forward() {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void go_backwards() {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}
void go_right() {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
}
void go_left() {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
void stop_all() {
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
Disconnect the USB cable from the Arduino.
Place your robot on the floor.
Turn the power ON for the motors.
Plug in the Arduino’s power.
Watch the Obstacle Avoiding Robot move!
If your wheels are not moving, check your connections, or increase the speed.
Related Articles
- How to Make an Obstacle Avoiding Robot | Arduino
- How to Build a Multi-Obstacle-Avoiding Robot Using Arduino (using more ultrasonic sensors reduces the number of blind spots the robot has)