
In my previous post on the ROS Navigation Stack, when we wanted to give our robot a goal location, we used the RViz graphical user interface. However, if you want to send goals to the ROS Navigation Stack using code, you can do that too. We’ll use C++.
The official tutorial is on this page, but I will walk you through all the steps below.
Real-World Applications
This project has a number of real-world applications:
- Indoor Delivery Robots
- Room Service Robots
- Mapping of Underground Mines, Caves, and Hard-to-Reach Environments
- Robot Vacuums
- Order Fulfillment
- Factories
Prerequisites
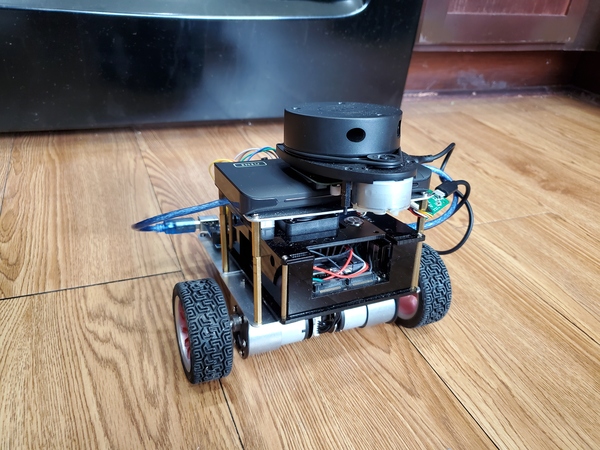
- You have a robot that is running the ROS Navigation Stack. I will be continuing from this tutorial.
Determine the Coordinates of the Goal Locations
Open a new terminal window, and launch the launch file.
roslaunch navstack_pub jetson_nano_bot.launch
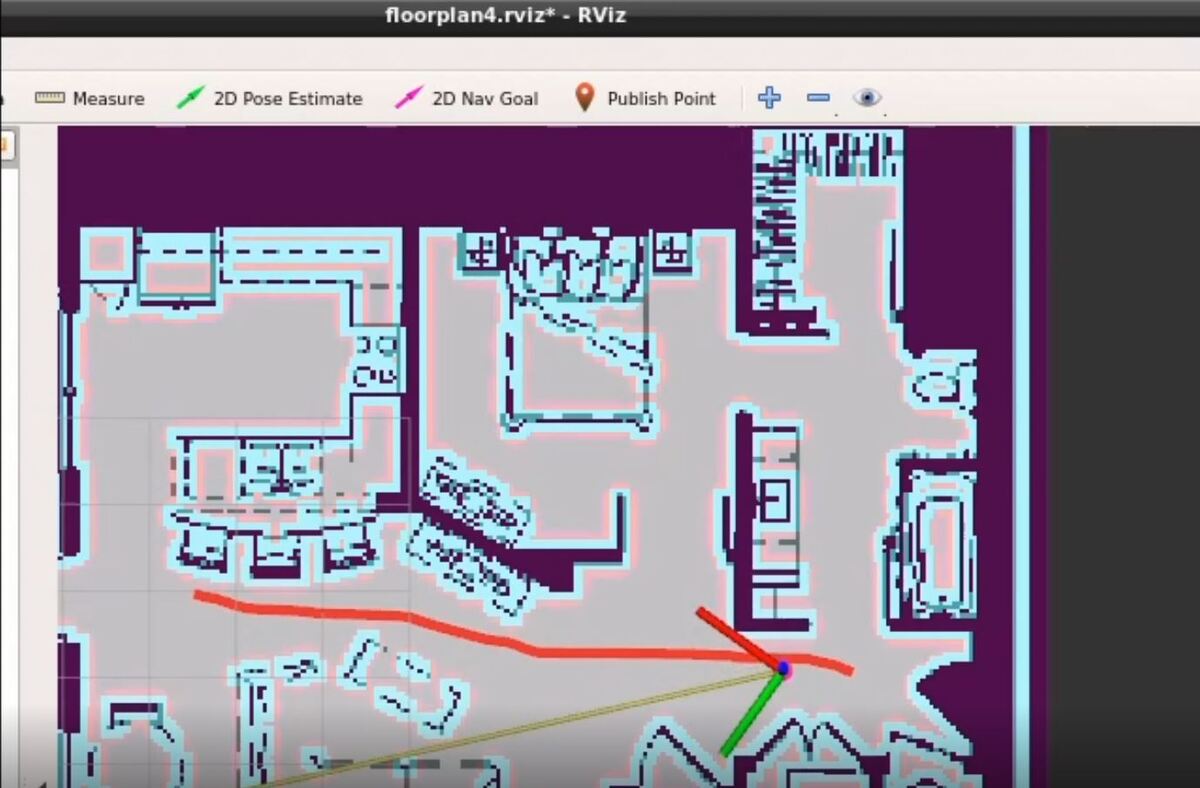
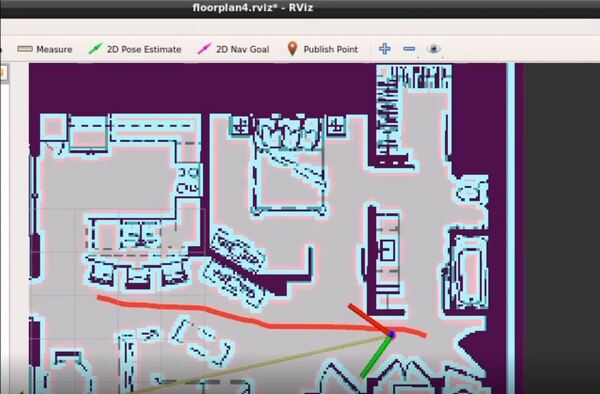
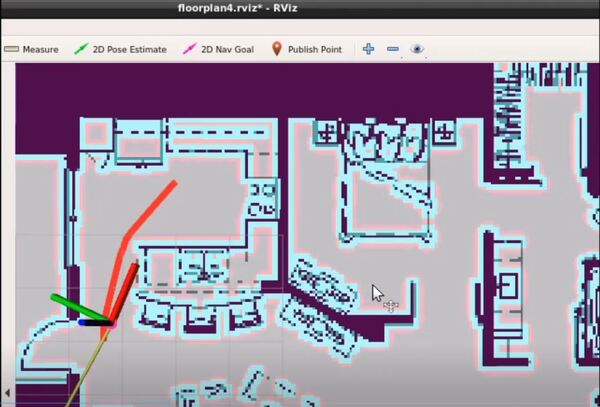
Make a note of the X and Y coordinates of each desired goal location. I use RViz Point Publish button to accomplish this. When you click that button, you can see the coordinate values by typing the following command in a terminal:
ros topic echo /clicked_point
I want to have an X, Y coordinate for the following six goal locations in my apartment.
1 = Bathroom
2 = Bedroom
3 = Front Door
4 = Living Room
5 = Home Office
6 = Kitchen
You notice how I numbered the goal locations above. That was intentional. I want to be able to type a number into a terminal window and have the robot navigate to that location.
For example, if I type 6, the robot will move to the kitchen. If I type 2, the robot will go to my bedroom.

Write the Code
Now let’s write some C++.
Open a terminal window.
roscd navstack_pub
cd src
gedit send_goals.cpp
/*
* Author: Automatic Addison
* Date: May 30, 2021
* ROS Version: ROS 1 - Melodic
* Website: https://automaticaddison.com
* This ROS node sends the robot goals to move to a particular location on
* a map. I have configured this program to the map of my own apartment.
*
* 1 = Bathroom
* 2 = Bedroom
* 3 = Front Door
* 4 = Living Room
* 5 = Home Office
* 6 = Kitchen (Default)
*/
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
#include <iostream>
using namespace std;
// Action specification for move_base
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
int main(int argc, char** argv){
// Connect to ROS
ros::init(argc, argv, "simple_navigation_goals");
//tell the action client that we want to spin a thread by default
MoveBaseClient ac("move_base", true);
// Wait for the action server to come up so that we can begin processing goals.
while(!ac.waitForServer(ros::Duration(5.0))){
ROS_INFO("Waiting for the move_base action server to come up");
}
int user_choice = 6;
char choice_to_continue = 'Y';
bool run = true;
while(run) {
// Ask the user where he wants the robot to go?
cout << "\nWhere do you want the robot to go?" << endl;
cout << "\n1 = Bathroom" << endl;
cout << "2 = Bedroom" << endl;
cout << "3 = Front Door" << endl;
cout << "4 = Living Room" << endl;
cout << "5 = Home Office" << endl;
cout << "6 = Kitchen" << endl;
cout << "\nEnter a number: ";
cin >> user_choice;
// Create a new goal to send to move_base
move_base_msgs::MoveBaseGoal goal;
// Send a goal to the robot
goal.target_pose.header.frame_id = "map";
goal.target_pose.header.stamp = ros::Time::now();
bool valid_selection = true;
// Use map_server to load the map of the environment on the /map topic.
// Launch RViz and click the Publish Point button in RViz to
// display the coordinates to the /clicked_point topic.
switch (user_choice) {
case 1:
cout << "\nGoal Location: Bathroom\n" << endl;
goal.target_pose.pose.position.x = 10.0;
goal.target_pose.pose.position.y = 3.7;
goal.target_pose.pose.orientation.w = 1.0;
break;
case 2:
cout << "\nGoal Location: Bedroom\n" << endl;
goal.target_pose.pose.position.x = 8.1;
goal.target_pose.pose.position.y = 4.3;
goal.target_pose.pose.orientation.w = 1.0;
break;
case 3:
cout << "\nGoal Location: Front Door\n" << endl;
goal.target_pose.pose.position.x = 10.5;
goal.target_pose.pose.position.y = 2.0;
goal.target_pose.pose.orientation.w = 1.0;
break;
case 4:
cout << "\nGoal Location: Living Room\n" << endl;
goal.target_pose.pose.position.x = 5.3;
goal.target_pose.pose.position.y = 2.7;
goal.target_pose.pose.orientation.w = 1.0;
break;
case 5:
cout << "\nGoal Location: Home Office\n" << endl;
goal.target_pose.pose.position.x = 2.5;
goal.target_pose.pose.position.y = 2.0;
goal.target_pose.pose.orientation.w = 1.0;
break;
case 6:
cout << "\nGoal Location: Kitchen\n" << endl;
goal.target_pose.pose.position.x = 3.0;
goal.target_pose.pose.position.y = 6.0;
goal.target_pose.pose.orientation.w = 1.0;
break;
default:
cout << "\nInvalid selection. Please try again.\n" << endl;
valid_selection = false;
}
// Go back to beginning if the selection is invalid.
if(!valid_selection) {
continue;
}
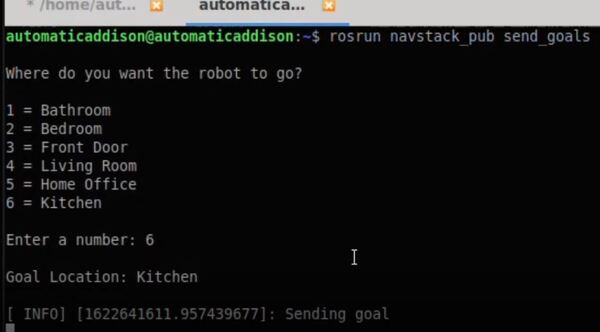
ROS_INFO("Sending goal");
ac.sendGoal(goal);
// Wait until the robot reaches the goal
ac.waitForResult();
if(ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("The robot has arrived at the goal location");
else
ROS_INFO("The robot failed to reach the goal location for some reason");
// Ask the user if he wants to continue giving goals
do {
cout << "\nWould you like to go to another destination? (Y/N)" << endl;
cin >> choice_to_continue;
choice_to_continue = tolower(choice_to_continue); // Put your letter to its lower case
} while (choice_to_continue != 'n' && choice_to_continue != 'y');
if(choice_to_continue =='n') {
run = false;
}
}
return 0;
}
Save and close the file.
Now open a new terminal window, and type the following command:
roscd navstack_pub
gedit CMakeLists.txt
Go to the bottom of the file.
Add the following lines.
INCLUDE_DIRECTORIES(/usr/local/lib)
LINK_DIRECTORIES(/usr/local/lib)
add_executable(send_goals src/send_goals.cpp)
target_link_libraries(send_goals ${catkin_LIBRARIES})
cd ~/catkin_ws/
Compile the package.
catkin_make --only-pkg-with-deps navstack_pub
Open a new terminal to launch the nodes.
roslaunch navstack_pub jetson_nano_bot.launch
Open another terminal to launch the send_goals node.
rosrun navstack_pub send_goals
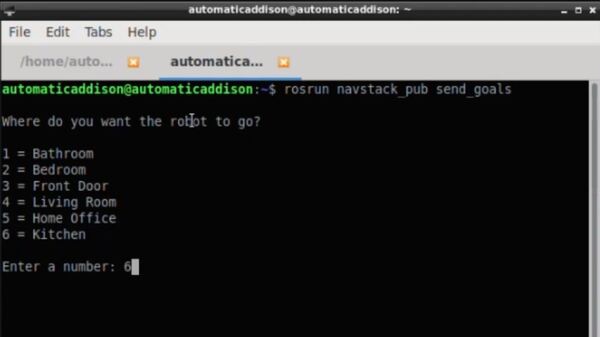
Follow the prompt to send your first goal to the ROS Navigation Stack.
To see the node graph (which shows what ROS nodes are running to make all this magic happen), type:
rqt_graph