
Up until now we have been interacting with ROS via the Linux terminal. ROS also has some really cool graphical user interface (GUI) tools that enable you to interact with ROS in a more visual way than we have done so far. Two of these tools are rviz and rqt.
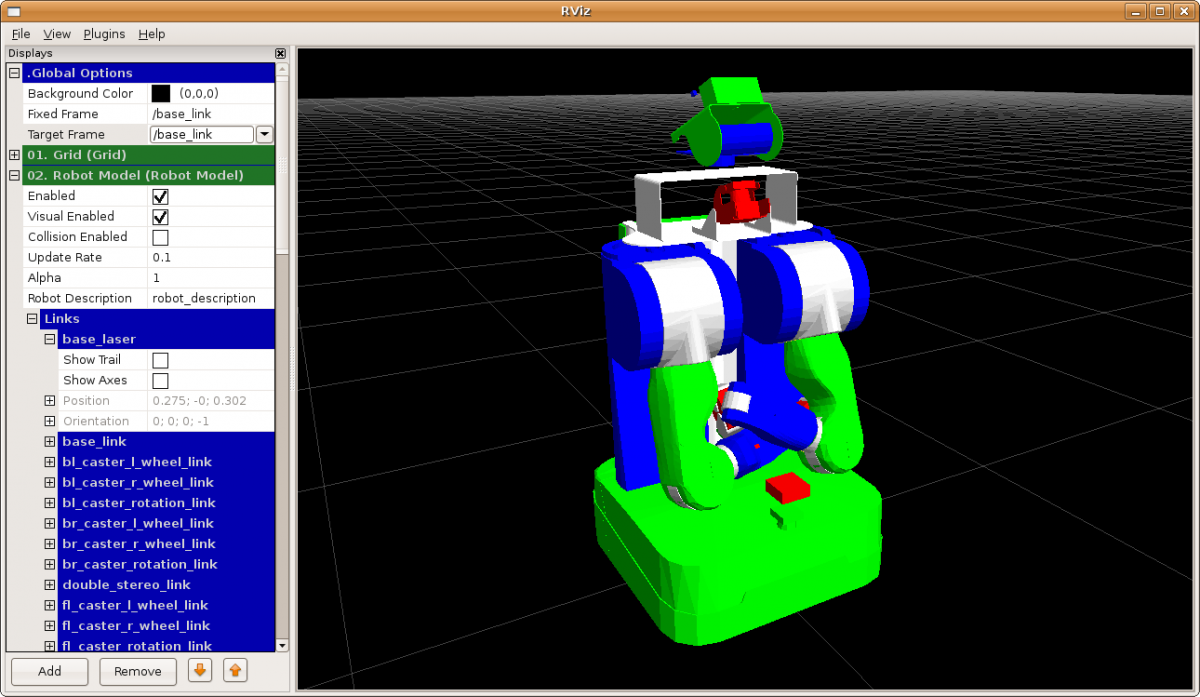
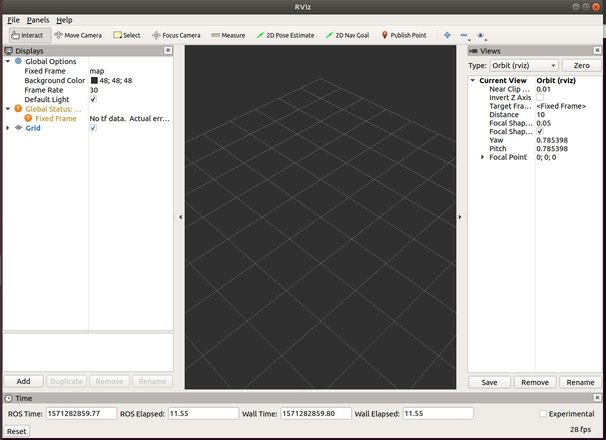
- rviz is a 3D visualizer for ROS
- rqt is a ROS visualization tool based on Qt, a free and open-source widget toolkit for creating GUIs.
In this tutorial, I’ll show you how to set up both of these tools.
You Will Need
In order to complete this tutorial, you will need:
Directions
To launch rviz, open a new terminal window and type:
roscore
Open up a new terminal tab and type:
rosrun rviz rviz
To launch rqt, open a new terminal window and type:
roscore
Open up a new terminal tab and type:
rosrun rqt_gui rqt_gui
You can see a list of available Plugins by going to the Plugins option. Let’s go to Plugins -> Visualization -> Plot to get a blank plot.
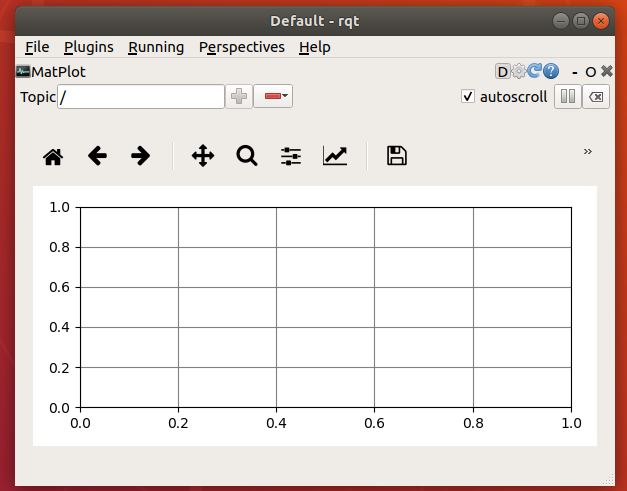
That’s it!