In this post, I’ll show you how to control the speed and direction of a small 3-6V DC motor.
Requirements
Here are the requirements:
- Change the direction a motor is spinning
- Change the speed a motor is spinning
You Will Need
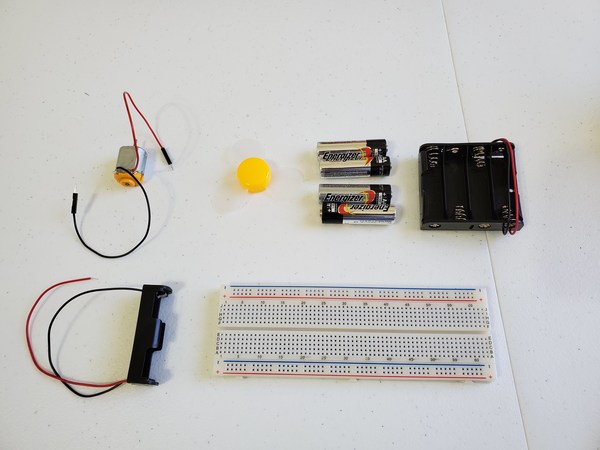
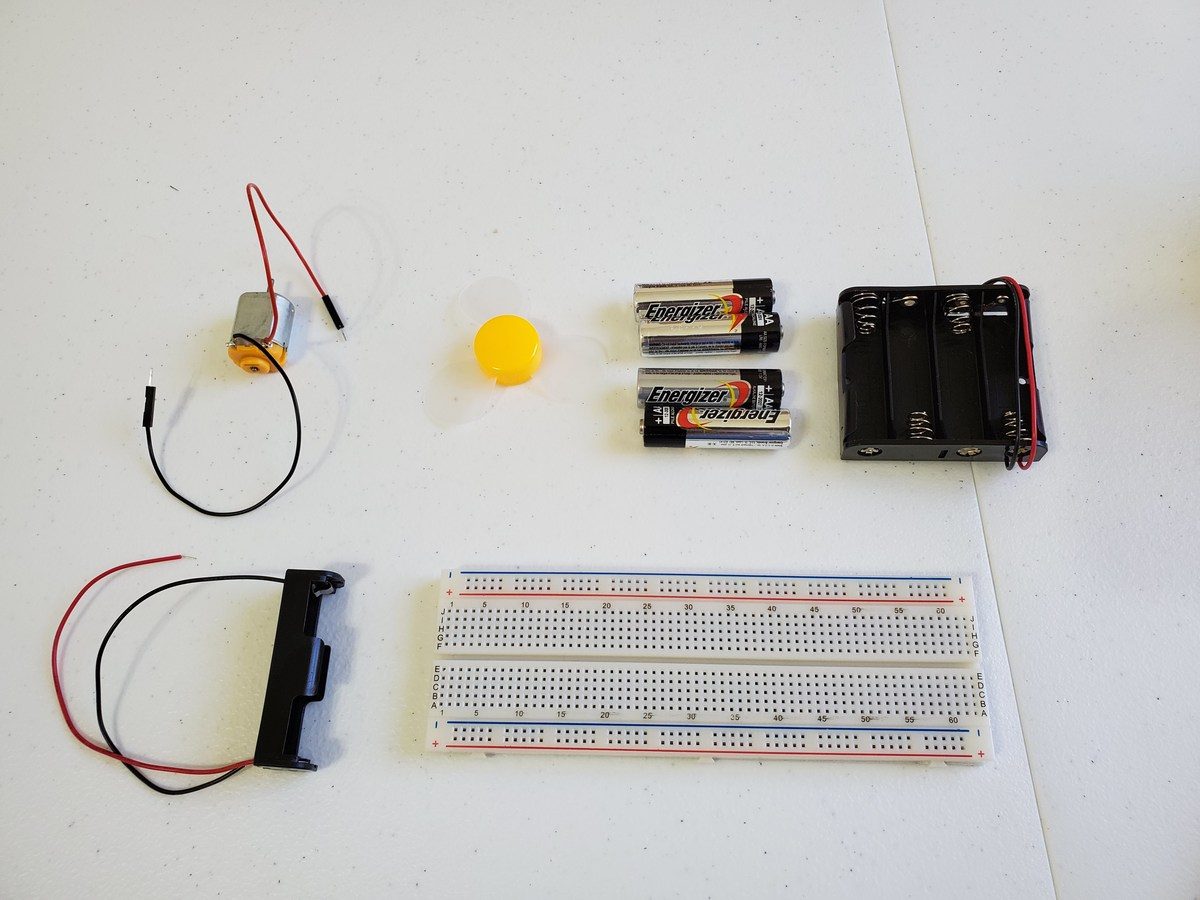
The following components are used in this project:
- Arduino Kit (Elegoo)
- Plastic propeller
- 3-6V DC Motor
- Four AA Batteries
- 4xAA Battery Holder
- 1xAA Battery Holder
- 1 Solderless Breadboard
Directions
Making the Motor Move
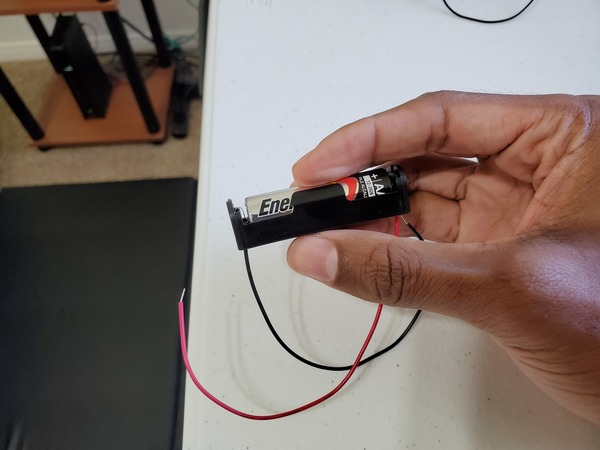
In order to make a motor move, it needs a power source. Start by, putting one AA battery into the battery holder.
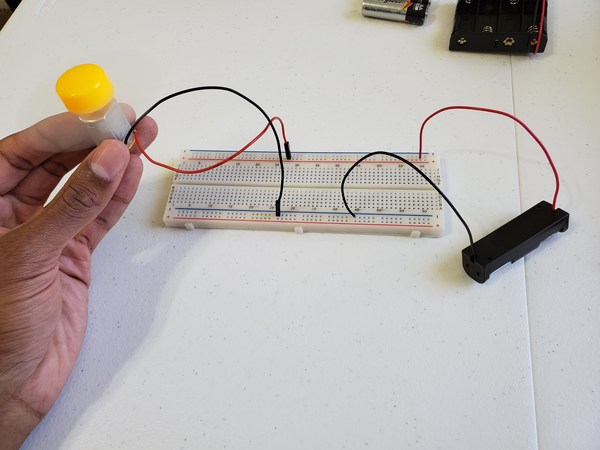
Place the black lead of the motor into the negative rail of the solderless breadboard. Then place the positive red lead into the positive rail of the solderless breadboard. Also add the propeller to the end of the motor.
Now we need to give the motor some power, so we place the red lead of the battery holder into the positive red rail of the solderless breadboard. Before you place the black lead of the battery holder into the negative rail of the solderless breadboard, pick up your motor in your hand because as soon as you place the black lead of the battery holder into the negative rail of the solderless breadboard, the propeller will begin to spin.
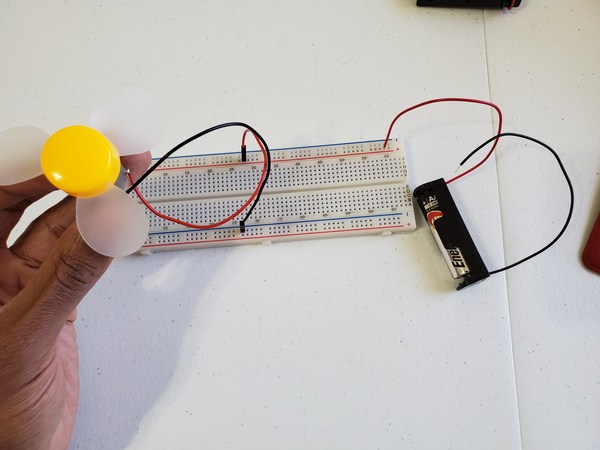
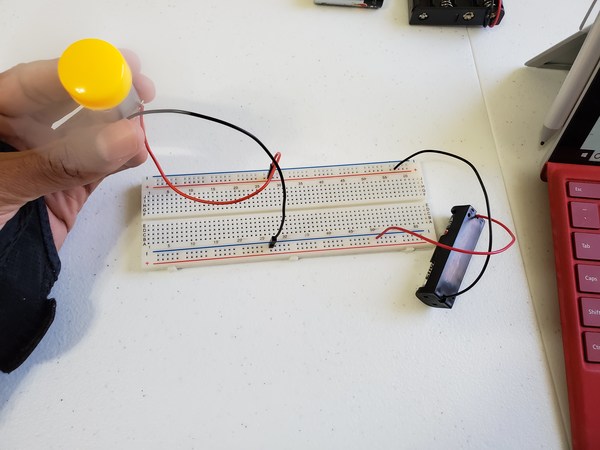
Now place the black lead of the battery holder into the negative rail of the solderless breadboard. The propeller should be spinning right now. Congrats! That is how you make a motor move.
Changing the Direction of the Motor
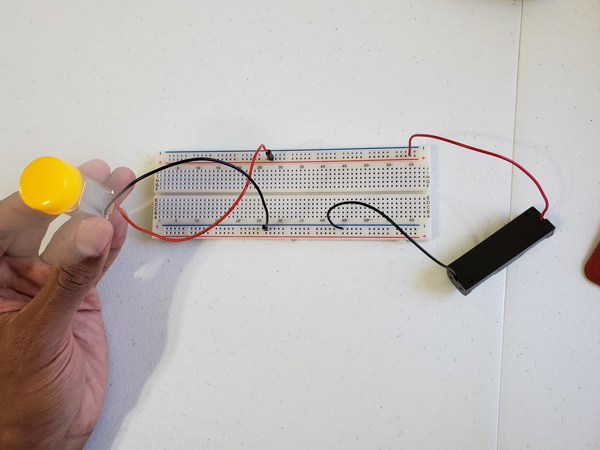
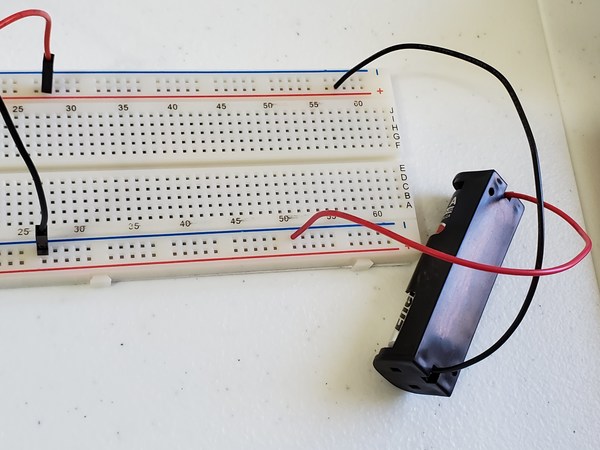
Now let’s change the direction of the motor. To do that, just switch the positions of the leads of the battery holder. That is, place the black lead of the battery holder into the positive rail of the solderless breadboard. Place the red lead of the battery holder into the negative rail of the solderless breadboard. That’s all there is to it.
Increasing the Speed of the Motor
In order to increase the speed of the motor, we need to add more voltage. A standard AA battery is 1.5 volts. How do we make the motor spin four times as fast? We need to use four AA batteries in series instead of one. Four batteries have a voltage of 6 volts, which is four times the voltage a single AA battery.


So let’s do this. Add four batteries to the 4xAA battery holder. Place the black lead of the battery holder to the negative rail of the solderless breadboard. Place the red lead of the battery holder to the positive rail of the solderless breadboard.
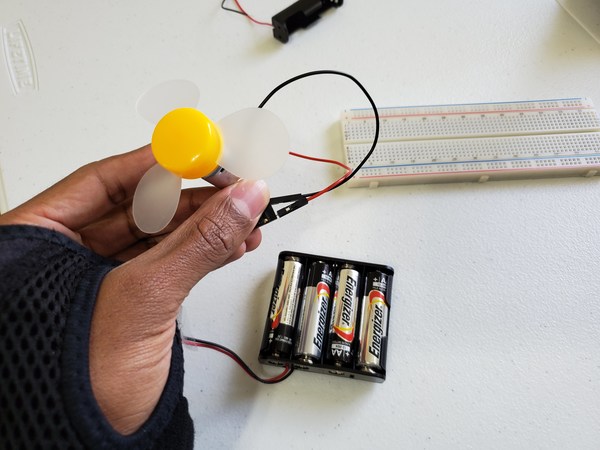
You should see the motor spinning four times as fast as it was previously. That’s it!