In this tutorial, we will install OpenCV 4.5 on the NVIDIA Jetson Nano. The reason I will install OpenCV 4.5 is because the OpenCV that comes pre-installed on the Jetson Nano does not have CUDA support. CUDA support will enable us to use the GPU to run deep learning applications.
The terminal command to check which OpenCV version you have on your computer is:
Now that we’ve installed the third-party libraries, let’s install OpenCV itself. The latest release is listed here. Again, pay attention to the line wrapping. The https://github… was too long to fit on one line.
I got this message when everything was done building.
Build OpenCV. This command below will take a long time (1-2 hours), so you can go do something else and come back later.
make -j4
If the building process stops before it reaches 100%, repeat the cmake command I showed earlier, and run the ‘make -j4’ command again.
One other thing. A lot of times I had the installation stall. To avoid that happening, I moved the mouse cursor every few minutes so that the screen saver for the Jetson Nano didn’t turn on.
Finish the install.
cd ~
sudo rm -r /usr/include/opencv4/opencv2
cd ~/opencv/build
sudo make install
sudo ldconfig
make clean
sudo apt-get update
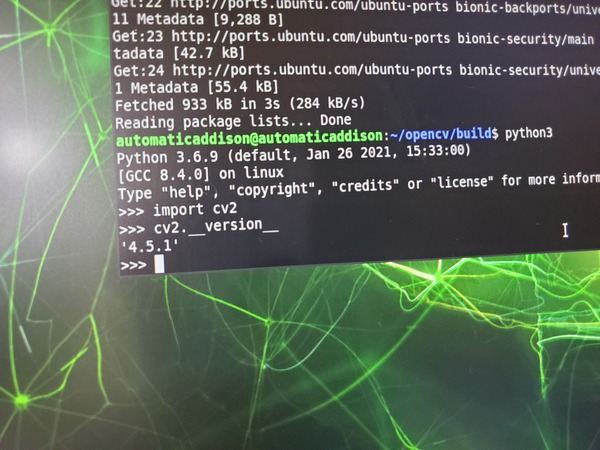
Verify Your OpenCV Installation
Let’s verify that everything is working correctly.
python3
import cv2
cv2.__version__
exit()
Final Housekeeping
Delete the original OpenCV and OpenCV_Contrib folders.
sudo rm -rf ~/opencv
sudo rm -rf ~/opencv_contrib
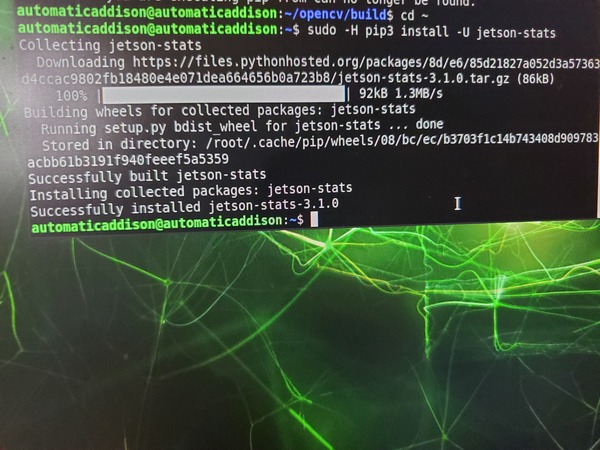
Install jtop, a system monitoring software for Jetson Nano.
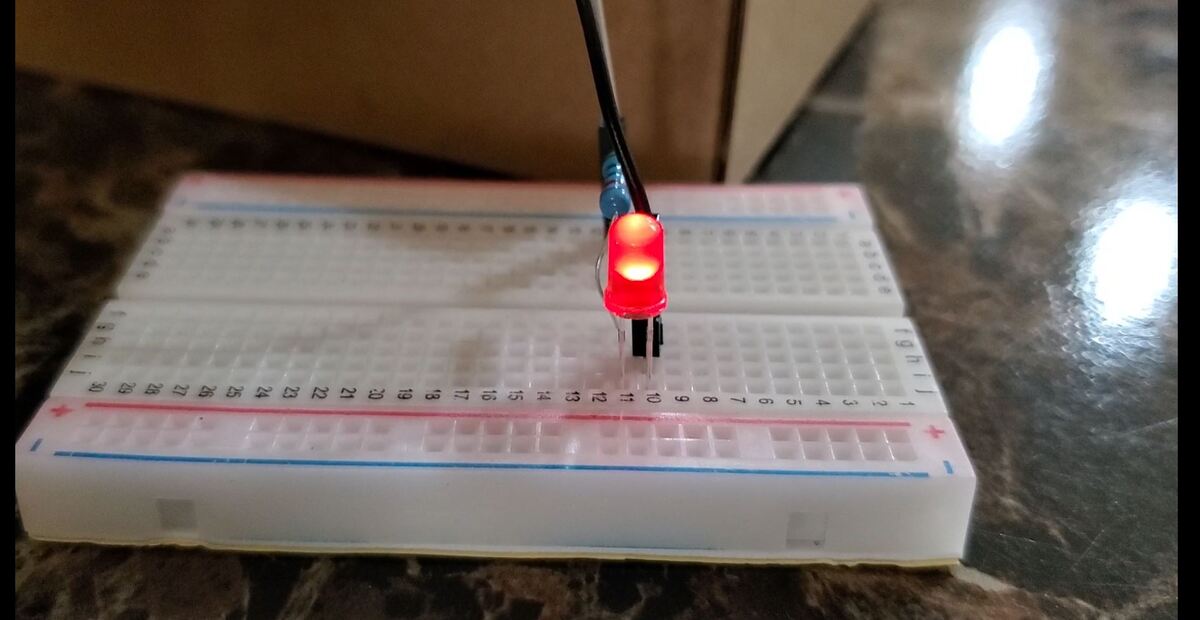
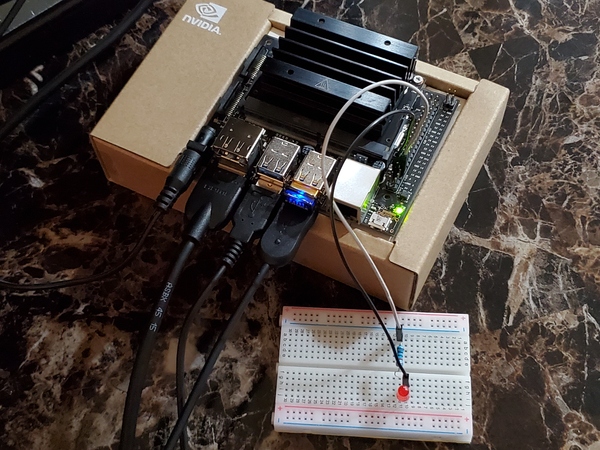
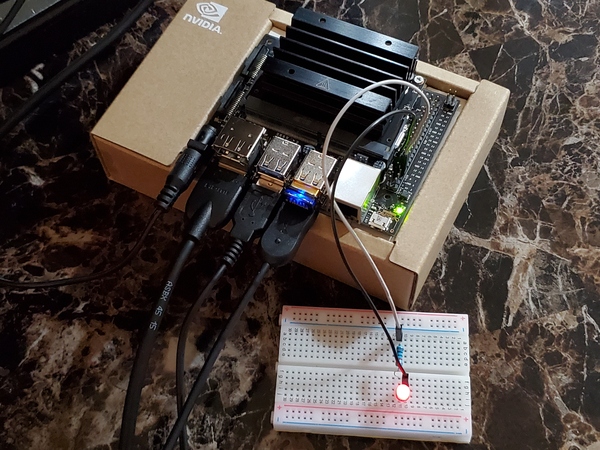
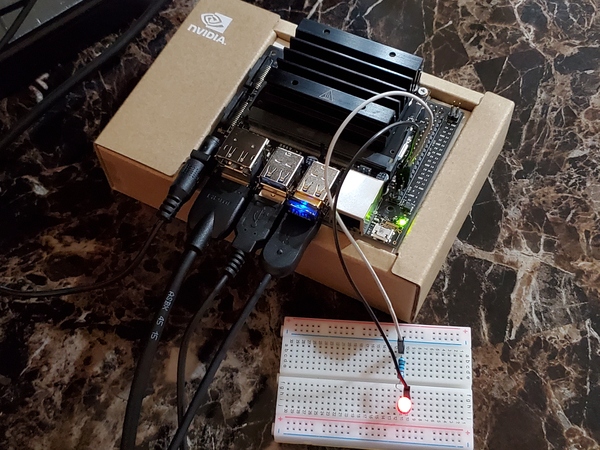
In this tutorial, we will blink an LED using NVIDIA Jetson Nano. I will show you how to use Python to blink an LED, and I will show you how to use C++ to blink an LED. Here is what you will build:
Disclosure (#ad): As an Amazon Associate I earn from qualifying purchases.
Set Up the Hardware
The first thing we need to do is to set up the hardware.
Gather all of the items from the “You Will Need” section and lay them out on a table.
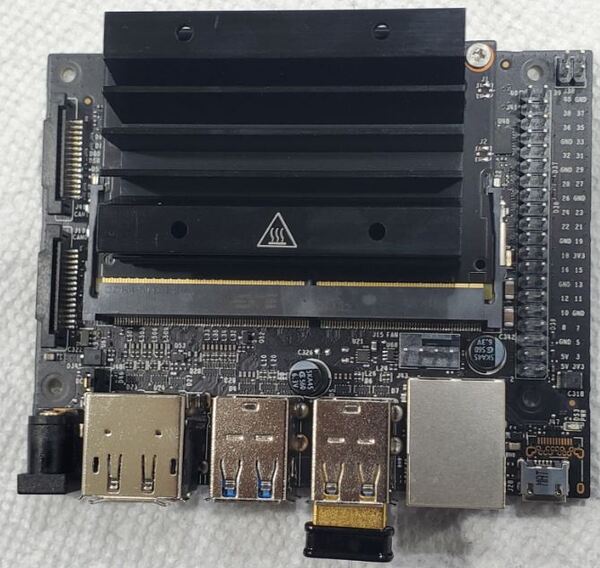
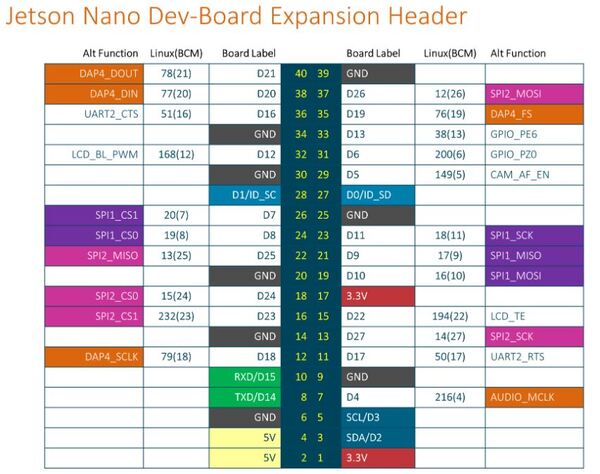
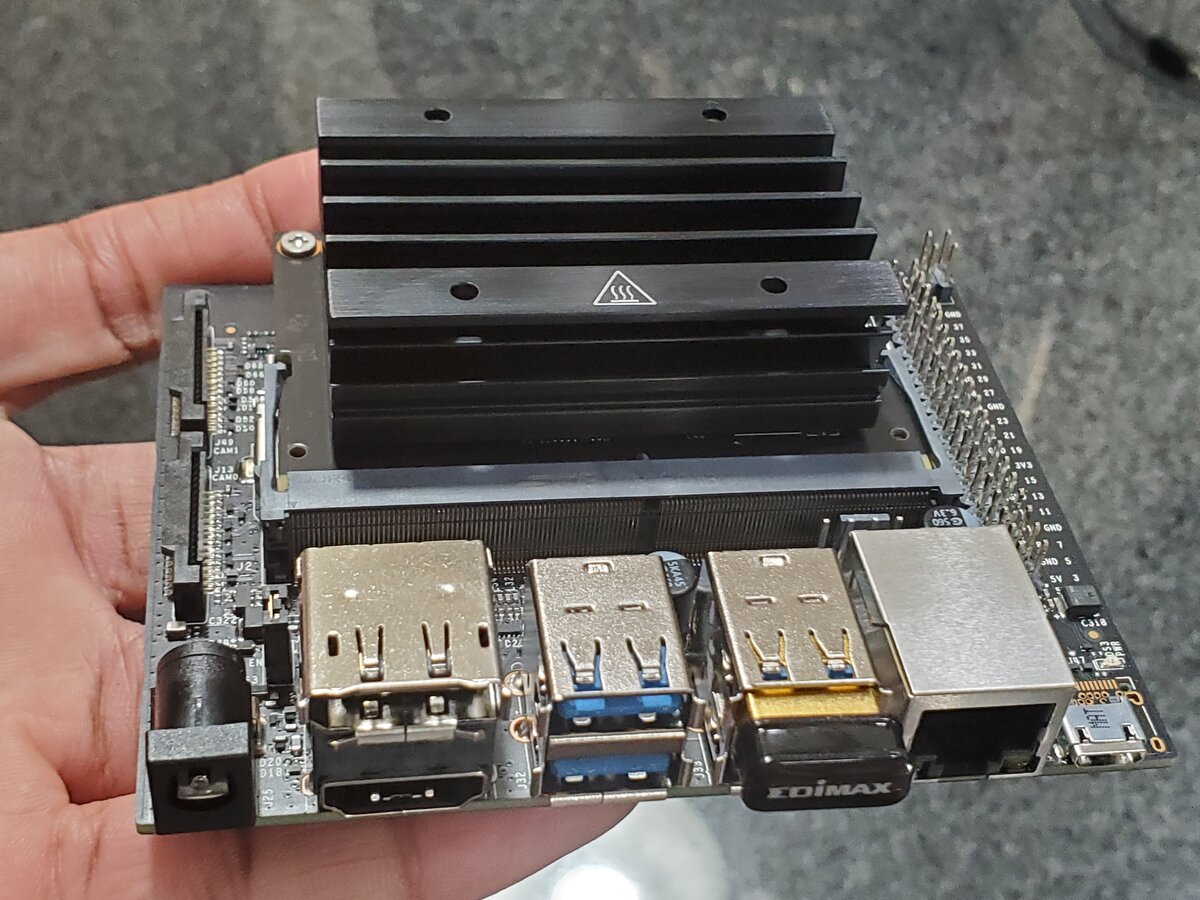
The NVIDIA Jetson Nano board has 40 general-purpose input/output pins (GPIO). Each pin can either be an input (e.g. connecting the Jetson Nano to a sensor) or an output (e.g. an LED). GPIO pins on the Jetson Nano use 3.3V by default.
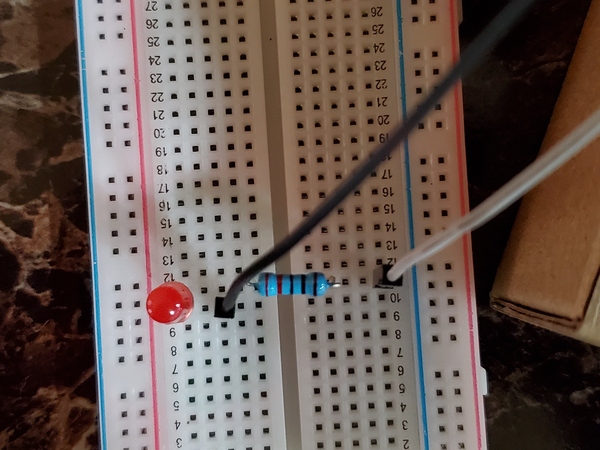
In order to get the LED to blink, we need to connect it to one of the 40 GPIO pins. Make sure you set everything up exactly like this image below:
Connect the 220 Ohm resistor to the positive pin of the LED (i.e. the long leg).
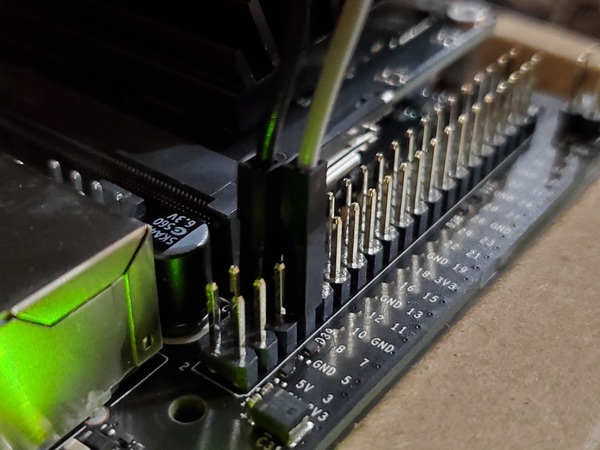
Connect the other end of this resistor to GPIO pin 7 on the Jetson Nano.
Connect the negative pin of the LED (i.e. the short leg) to the GND pin on the Jetson Nano.
The connections are made using Male-Female jumper wires.
If that command above doesn’t work, type the following command:
sudo pip install Jetson.GPIO
When I typed these commands, I got a message which a bunch of warning signs, but at the end of all that the following text was printed to the console:
“Requirement already satisfied…”
This message means that the GPIO library for Python is already installed on my Jetson Nano.
Reconfigure security permissions. Instead of your_user_name, I used automaticaddison, which is my username.
sudo groupadd -f -r gpio
sudo usermod -a -G gpio your_user_name
Reboot the computer.
sudo reboot
Let’s check to see if the library is fully setup.
python3
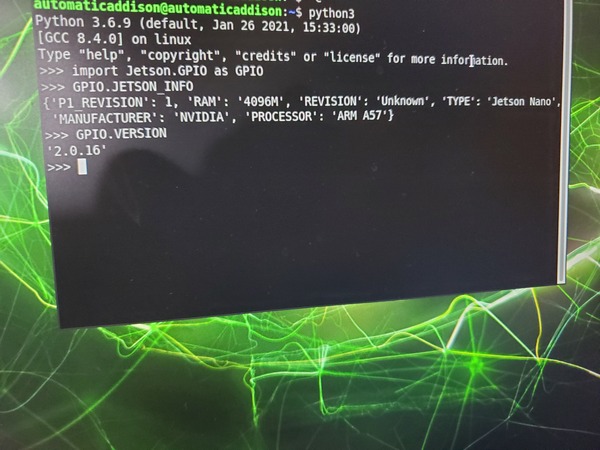
>>> import Jetson.GPIO as GPIO
>>> GPIO.JETSON_INFO
>>> GPIO.VERSION
Here is what I see:
Write the Code
Create a new folder. Open up a new terminal, and type:
cd Documents
mkdir led_blink
cd led_blink
Let’s create a program to blink the LED.
Create a file named gpiodemo.py.
gedit gpiodemo.py
# GPIO library
import Jetson.GPIO as GPIO
# Handles time
import time
# Pin Definition
led_pin = 7
# Set up the GPIO channel
GPIO.setmode(GPIO.BOARD)
GPIO.setup(led_pin, GPIO.OUT, initial=GPIO.HIGH)
print("Press CTRL+C when you want the LED to stop blinking")
# Blink the LED
while True:
time.sleep(2)
GPIO.output(led_pin, GPIO.HIGH)
print("LED is ON")
time.sleep(2)
GPIO.output(led_pin, GPIO.LOW)
print("LED is OFF")
Run the Code
You can run your program, gpiodemo.py, in the Terminal. Type this command:
python3 gpiodemo.py
If you get any errors due to security issues, you can run the gpiodemo.py file with the sudo command.
sudo python3 gpiodemo.py
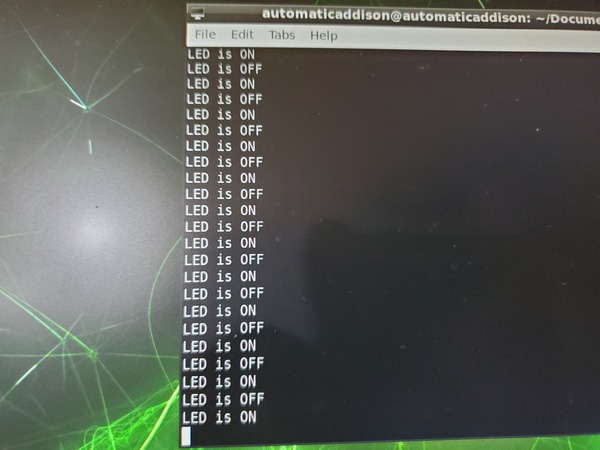
You should see the LED blinking.
You should also see output in the terminal.
Press CTRL+C when you’re ready to stop the program.
Make sure you’re connected to the Internet, and open a new terminal window.
git clone https://github.com/pjueon/JetsonGPIO
cd JetsonGPIO/build
make all
sudo make install
Reboot your machine.
sudo reboot
See if the header file for the C++ GPIO Library for Jetson Nano is on your machine. The command below will show the path to the header file.
find /home -name JetsonGPIO.h
Write the Code
Go to the led_blink directory.
cd Documents/led_blink
Open a new C++ program.
gedit led_blink.cpp
Write the following code. We want to blink an LED every 0.5 seconds:
// Handles input and output
#include <iostream>
// For delay function
#include <chrono>
// Handles threads of program execution
#include <thread>
// Signal handling
#include <signal.h>
#include <JetsonGPIO.h>
// Pin Definitions
int led_pin = 7;
// Flag to determine when user wants to end program
bool done = false;
// Function called by Interrupt
void signalHandler (int s){
done = true;
}
int main() {
// When CTRL+C pressed, signalHandler will be called
// to interrupt the programs execution
signal(SIGINT, signalHandler);
// Pin Definitions
GPIO::setmode(GPIO::BOARD);
// LED pin gets set to high initially
GPIO::setup(led_pin, GPIO::OUT, GPIO::HIGH);
std::cout << "Press CTRL+C to stop the LED" << std::endl;
int curr_value = GPIO::HIGH;
// Blink LED every 0.5 seconds
while(!done) {
std::this_thread::sleep_for(std::chrono::milliseconds(500));
curr_value = GPIO::HIGH;
GPIO::output(led_pin, curr_value);
std::cout << "LED is ON" << std::endl;
std::this_thread::sleep_for(std::chrono::milliseconds(500));
curr_value = GPIO::LOW;
GPIO::output(led_pin, curr_value);
std::cout << "LED is OFF" << std::endl;
}
GPIO::cleanup();
return 0;
}
Save the file, and close it.
See if your file is in there.
ls
Run the Code
Compile the program.
g++ -o led_blink led_blink.cpp -lJetsonGPIO
(That is a lowercase L in front of Jetson above)
See if the executable is in the current directory.
ls
You should see a new file named led_blink.
If you see an error, check your program to see if it is exactly like I wrote it.
Run the program.
./led_blink
You should see the LED blinking every 0.5 seconds (i.e. 500 milliseconds).
In this tutorial, I will show you everything you need to know to get started with the NVIDIA Jetson Nano. The official tutorial is here, but I will run through all the steps below. I recommend you go through these steps slowly. It took me a full day to set up the Jetson Nano, so be patient and enjoy the journey.
You Will Need
This section is the complete list of components you will need for this project (#ad).
Disclosure (#ad): As an Amazon Associate I earn from qualifying purchases.
Write the Operating System Image to the microSD Card
The first thing we need to do is to prepare the operating system. The Jetson Nano uses a microSD card for storing the operating system.
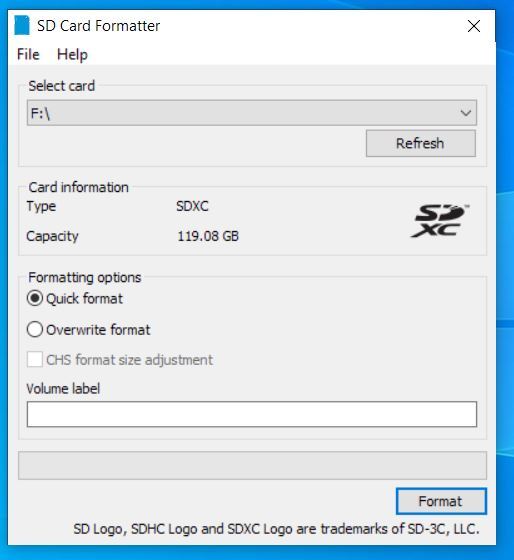
Grab your SD/Micro SD Card Reader with Standard USB Connector.
Grab your tiny 128GB MicroSD Card, and slide it into the adapter.
Put the adapter into the SD card reader.
Plug the SD card reader into your PC.
Check to see if the SD card reader appears in your lists of disks. Make a note of where this is on your PC. My SD card reader shows up as my F drive.
Download the Jetson Nano Developer Kit SD card image file (often called “JetPack”) to your PC. Mine will save to my Desktop. It is a large file and will take a long time to download. Just go get something to eat and come back when it is finished.
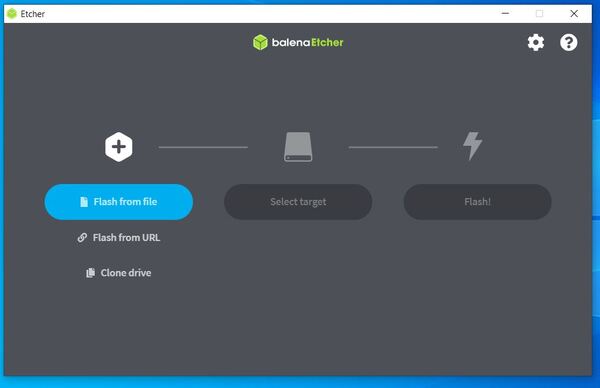
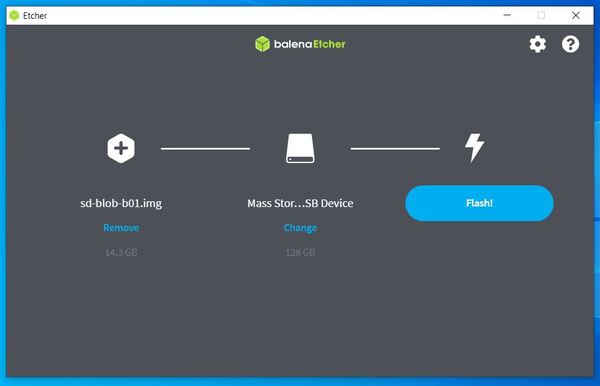
Now, we need to write the image to our microSD card. The instructions will vary depending if you have Windows, Mac OS, or Linux. I have a Windows PC, so here is what I will do next.
Click “Flash from file” and choose the zipped Nano Jetson image file you downloaded earlier.
Insert your microSD card if not already inserted.
Click “Select target” and choose the SD card’s drive. Remember mine is on the F drive.
Click “Flash!” It will take Etcher a while to write and validate the image, so go do something else and come back.
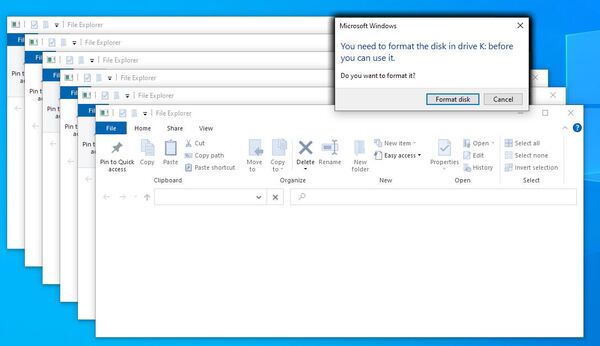
After Etcher finishes, Windows may let you know it doesn’t know how to read the SD Card. Just click Cancel all those screens and remove the microSD card.
Just cancel all of these weird pop ups.
Setup and First Boot
Unfold the paper stand, and place the Nano Jetson inside the developer kit box.
Set the developer kit on top of the paper stand.
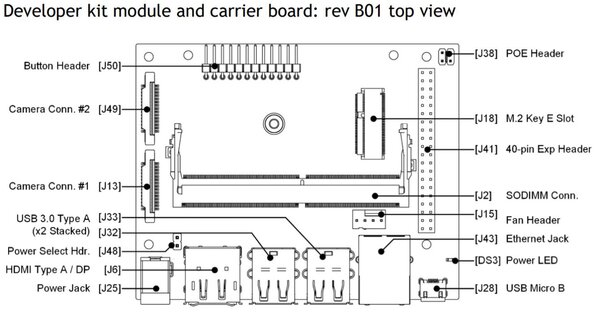
Insert the microSD card (with system image already written to it) into the slot on the underside of the Jetson Nano module.
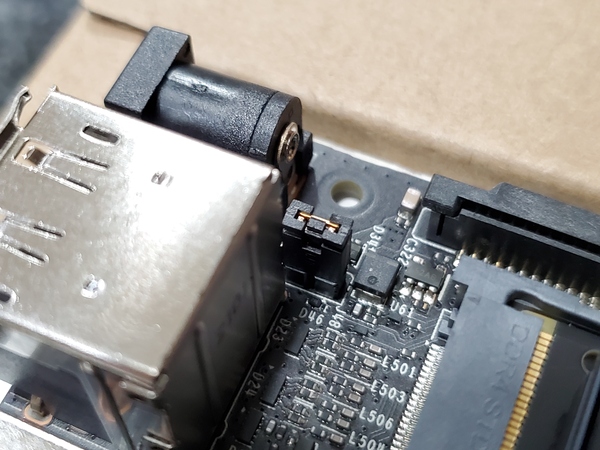
Make sure the jumper is pushed into the J48 Power Select Header pins.
Connect the Jetson Nano into your monitor. I am using an HDMI cable to connect my monitor to my Jetson Nano. If you don’t have one, you can buy one off Amazon or any other electronic retailer.
Connect the Jetson Nano into your keyboard.
Connect the Jetson Nano into your mouse.
Grab the “Power Supply Applicable for Jetson Nano 5V/4A OD 5.5mm ID 2.1mm”.
Connect the power supply to the 5V/4A Power Jack. The developer kit will power on automatically.
Allow 1 minute for the developer kit to boot.
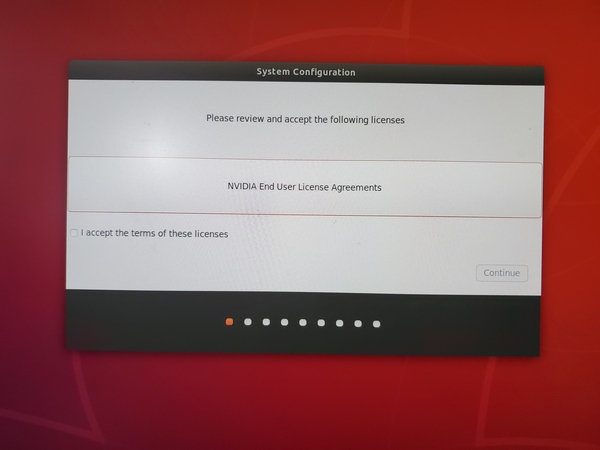
A green LED next to the Micro-USB connector will light as soon as the developer kit powers on. When you boot the first time, the developer kit will take you through some initial setup, including:
Review and accept NVIDIA Jetson software End User License Agreement.
Select the system language.
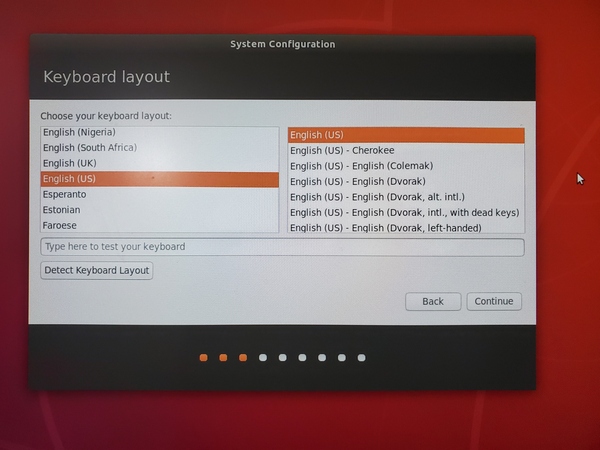
Select the keyboard layout.
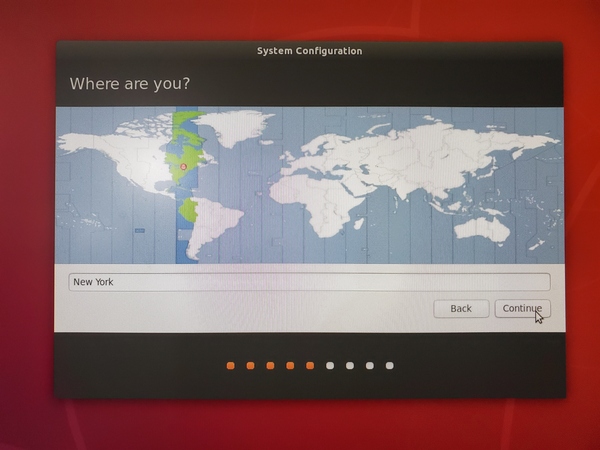
Select the time zone.
Create a username, password, and computer name. Be sure to select “Log in automatically.”
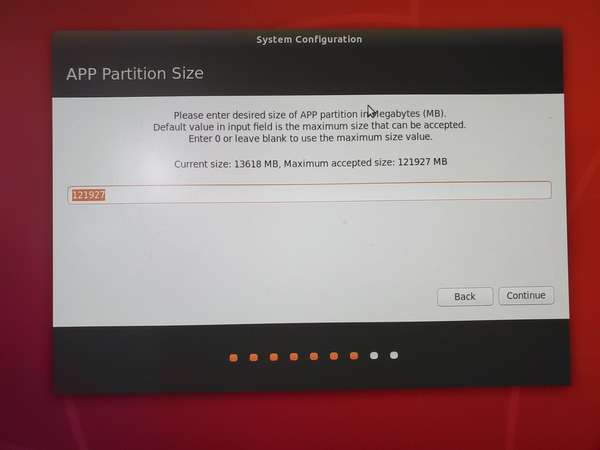
Select APP partition size. NVIDIA recommends to use the maximum size.
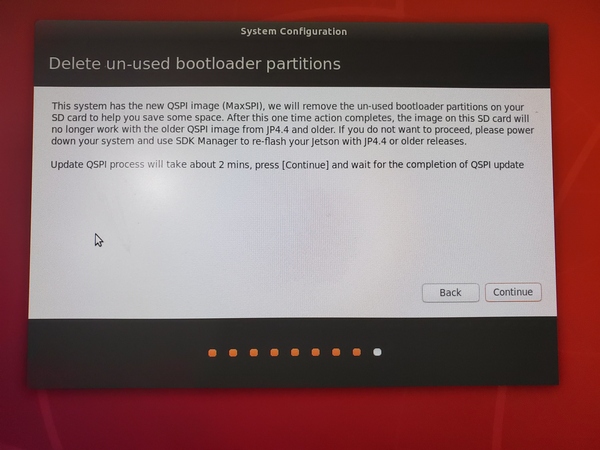
Here is the screen you should see now.
Update QSPI process and click Continue.
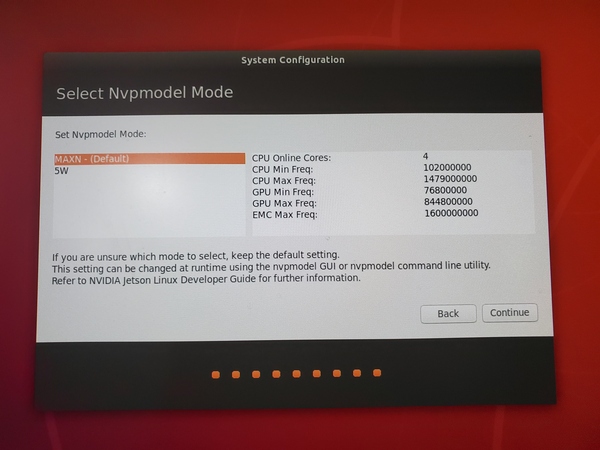
Keep the default setting for the Nvpmodel Mode, and click Continue.
Your Nvidia will automatically reboot to the Ubuntu desktop.
Click the Terminal icon in the bottom-left.
Restart the computer again.
sudo reboot
Set Up WiFi
Grab your WiFi adapter.
Plug it into one of the USB ports on the Jetson Nano.
To set up WiFi, you can use the following command in a terminal window (sudo nmtui), or follow the steps below.
Click the settings (gear) icon in the upper right corner of the desktop.
Click System Settings in the drop down menu.
Click the Network dialog in the dialog box.
Set up the network connection.
Reboot the computer.
sudo reboot
Your computer might pop up a Software Updater dialog. You can click Install Now.
Right click on the Desktop.
Open the Terminal.
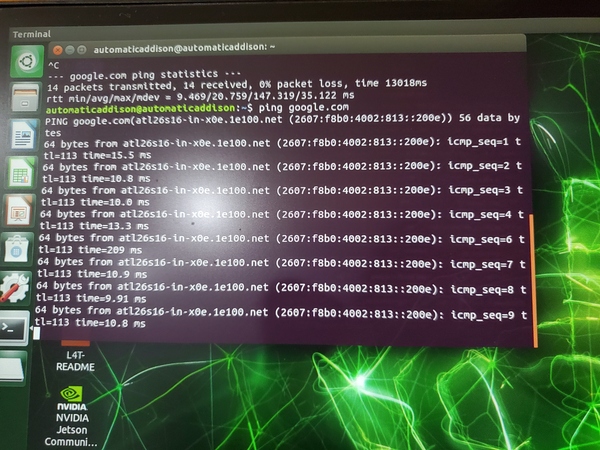
Check if your WiFi setup is fine.
ping google.com
Turn off the power save mode to get stability.
sudo iw dev wlan0 set power_save off
sudo reboot
Run Updates
Let’s update our package list and upgrade the software on the system.
Open the terminal, and type:
sudo apt-get update
sudo apt-get upgrade
Type Y and press Enter to upgrade everything.
Reboot the computer.
sudo reboot
Collect Information About Your Jetson Nano
Open a terminal window, and type the following command.
hostname -I
Make a note of your internal IP address.
Change the Power Supply Settings
If you are using the 5V/4A power supply like I am, open your terminal window, and type:
sudo nvpmodel -q
If you see the following, you are good to go.
NV Power Mode: MAXN
Otherwise, type the following command:
sudo nvpmodel -m 0
This command will give you high power performance. If you want to change it to low performance because you are using microUSB to power the Jetson Nano, here is the command:
sudo nvpmodel -m 1
Create a Swap File
Some of the applications I will use on my Jetson Nano require a lot of memory. To keep the Nano from crashing, we need to create a swap file.
See if your Nano already has swap space.
free -h
If you don’t have swap space, add a 4GB swap file.
Once the Nano is done rebooting, see if you have swap space.
free -h
Connect to Your NVIDIA Jetson Nano Remotely From Your PC
Now I will show you everything you need to know to connect to your NVIDIA Jetson Nano desktop remotely from your own PC (on the same WiFi network) using an application called VNC Viewer.
Save RAM By Using the LXDE Desktop
First, let’s free up some RAM to keep our Nano from crashing.
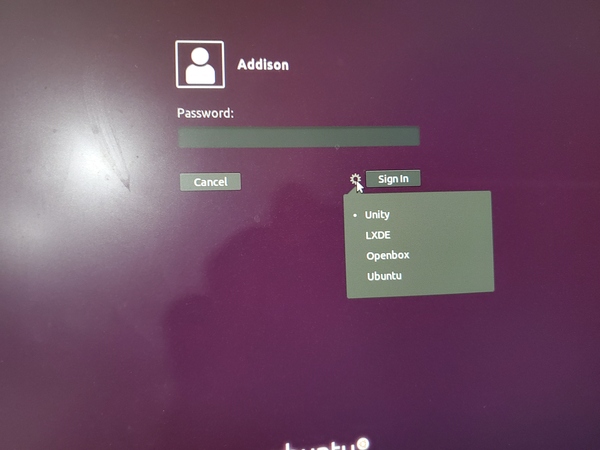
Type the following command. Your computer will then reboot to a login screen.
$DESKTOP_SESSION
On the login screen, click the gear icon next to “Sign In”.
Scroll down, and select LXDE.
Type your password, and click Sign In.
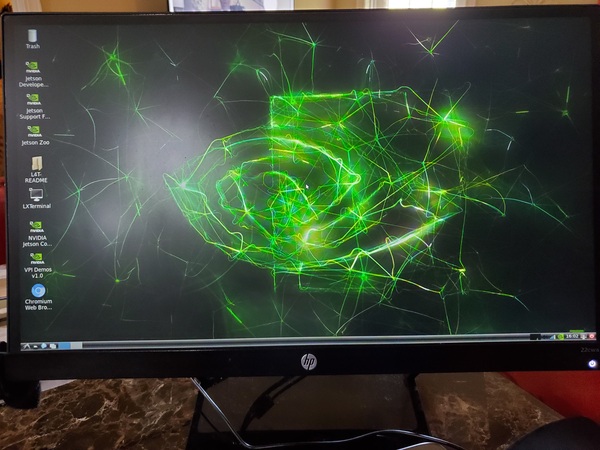
LXDE is now your desktop environment.
Reboot.
sudo reboot
Open a terminal window in your Nano, and type the following command to see what desktop environment you’re using.
echo $XDG_CURRENT_DESKTOP
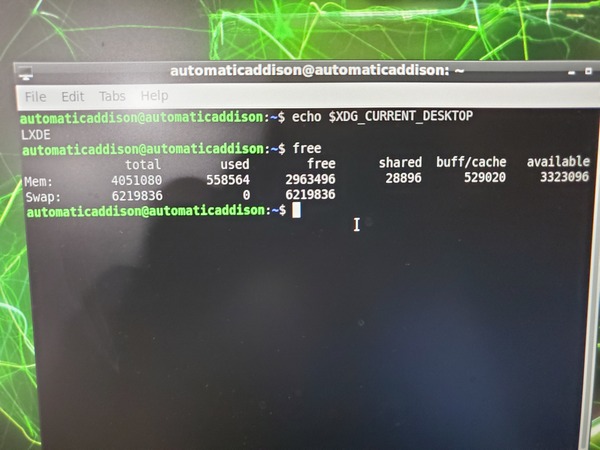
See how much free memory you have.
free
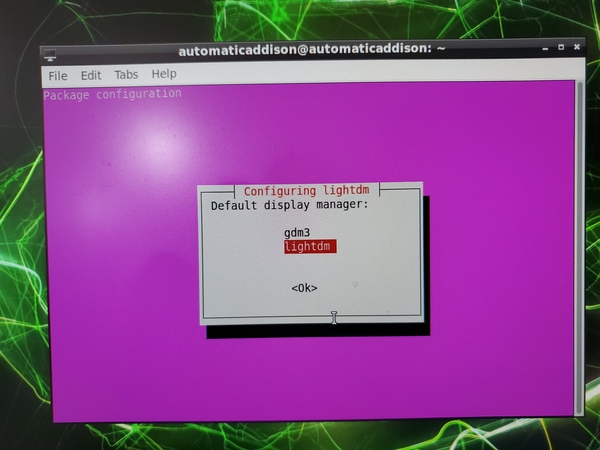
Now open a terminal window, and change the display manager from gdm3 (GNOME display manager) to lightdm.
If you’re using Windows, go to your PC, and download and install VNC Viewer.
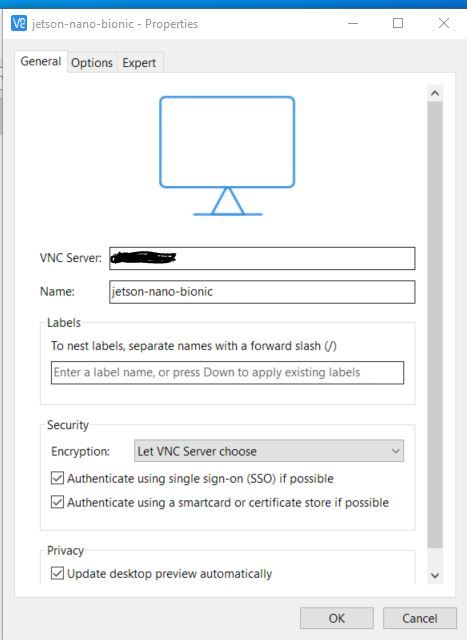
Launch the VNC viewer and type in the IP address of your Jetson Nano. You can also go to File -> New Connection
If you have configured the VNC server for authentication, provide the VNC password.
The remote desktop connection lag might be very strong.You change the desktop resolution by clicking in the bottom-left and going to Preference -> Monitor settings.
I’m not a huge fan of the remote desktop for the Jetson Nano. Raspberry Pi is far superior. Hopefully the guys at NVIDIA fix that in the future by building in WiFi to their boards.
Now, power OFF your Jetson Nano.
sudo shutdown -h now
Remove the power supply, and then plug it back in.
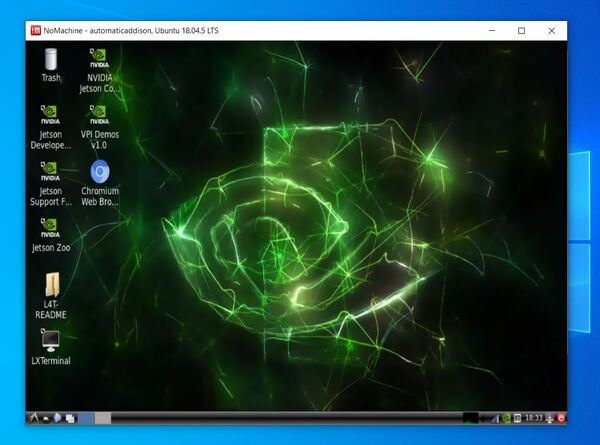
After you have downloaded it, launch the NoMachine application on your PC.
Double click on your Jetson Nano icon (i.e. Ubuntu 18.04).
Click Yes.
Type in the username and password for the Jetson Nano machine.
Click through the prompts, and you will see your Desktop appear.
Now, power OFF your Jetson Nano.
sudo shutdown -h now
Remove the power supply, and then plug it back in.
Install Putty (Optional)
Putty is a program that will enable us to connect to the Jetson Nano’s terminal only.
Go to putty.org and download the installer for your machine. I am using a 64-bit Windows computer so that is what I will select.
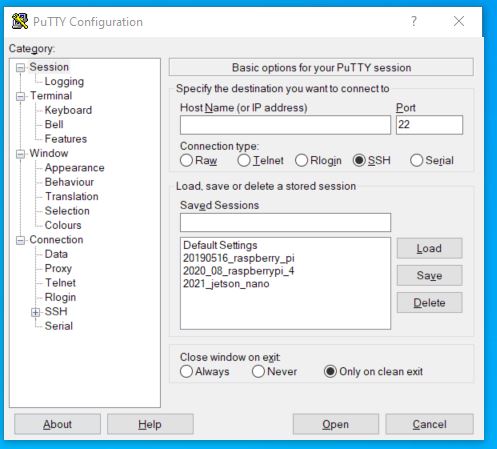
Follow the instructions to download Putty. Once you’ve finished, open up Putty. If you’re using Windows, you can usually find it in the Start Menu.
The first thing you will do is type in the IP address of your Jetson Nano.
Select the SSH radio button.
Click the Open button.
If you get a popup window, click “Yes” and then you will go to a black terminal window.
Type in the username and password of your Jetson Nano.
That’s it. You’re logged in to your Jetson Nano via the command line interface.
You are now good to go.
Next Steps
A lot of Jetson Nano projects involve heavy computation (e.g. deep learning and robotics), which can make the board heat up pretty quickly. I recommend buying and setting up your Jetson Nano with a cooling fan and case.
Whew! That was a lot of work setting up the NVIDIA Jetson Nano.