
Kinematics is about how you convert the position and velocity of an end effector (e.g. gripper, robotic hand, etc.) to position and velocity of the joints (i.e. the servo motors along a robotic arm), and vice-versa.
Let’s take a look at the vocabulary of that sentence.
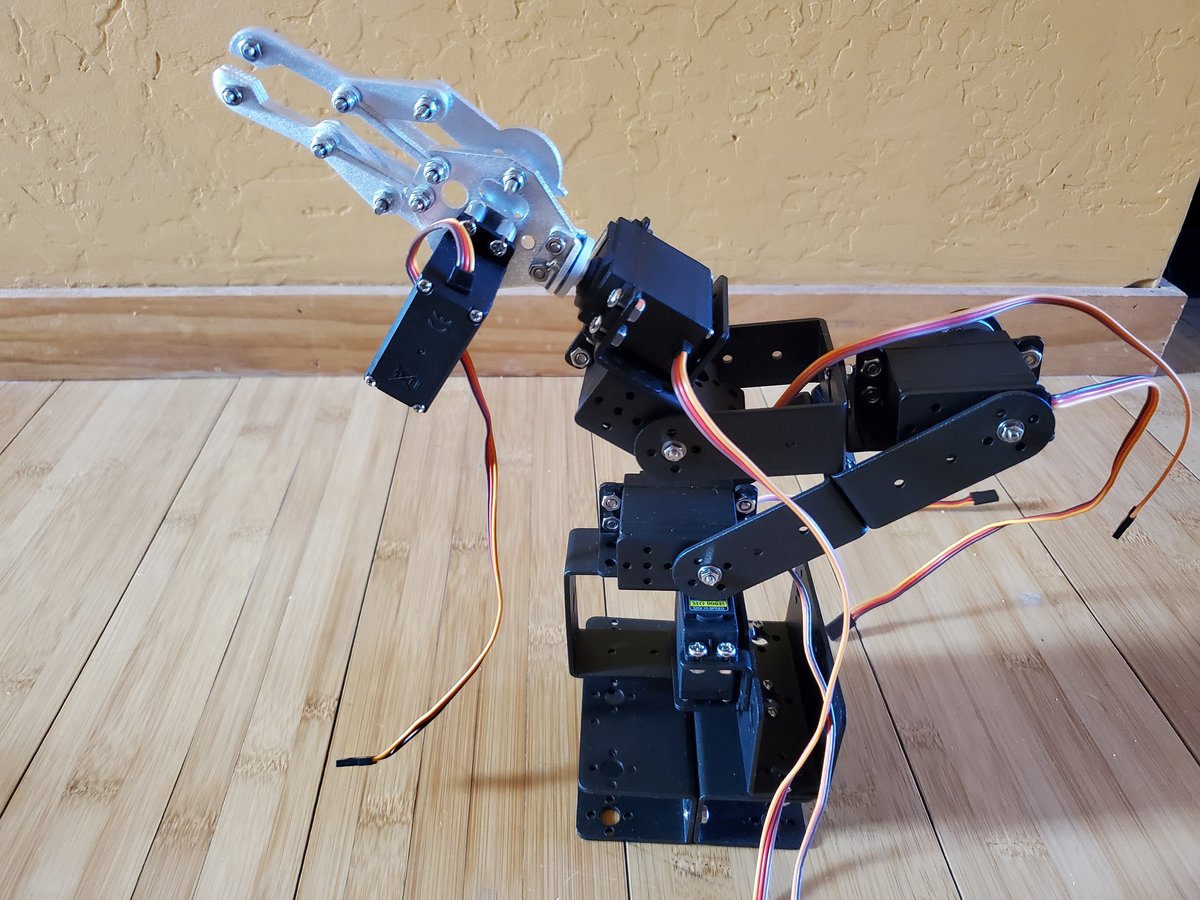
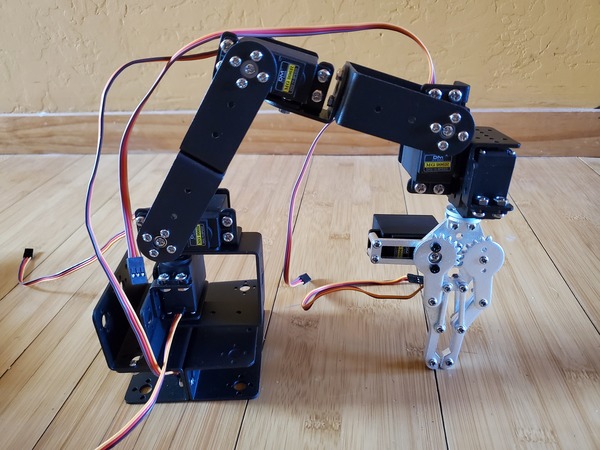
An end effector is the component on a robot arm that has an effect on the environment. For example, consider this robotic arm below. The end effector is the silver robotic gripper.
An end effector could also be a robotic hand or a vacuum gripper.
A joint on a robot is like a joint on the human body (shoulder, elbow, et.). A joint is the moveable part of a robot.
For a typical robotic arm, a joint is a motor that connects one link to another link. To continue the analogy of the human body, the lower arm and upper arm links are connected by the elbow joint.
In the photo of the robotic arm above, there are 6 joints (i.e. 6 motors). Going from the base of the robot to the gripper, you have a:
- Base joint (Motor 0)
- Shoulder joint (Motor 1)
- Elbow joint (Motor 2)
- Wrist joint (Motor 3)
- Hand joint (Motor 4)
- Gripper Joint (i.e. the silver claw) (Motor 5)
Links (i.e. the black brackets in the robotic arm above) are the stiff components that connect the joints (i.e. servo motors) together.