In this project, we will learn how to apply a mask to an image using OpenCV. Image masking involves highlighting a specific object within an image by masking it.
Requirements
- Develop a program that takes a color image as input and allows the user to apply a mask.
- When the user presses “r,” the program masks the image and produces an output image which is the image in black and white (i.e. grayscale) with only the masked area in color.
You Will Need
- Python 3.7 (or higher)
Directions
Let’s say you have the following image:

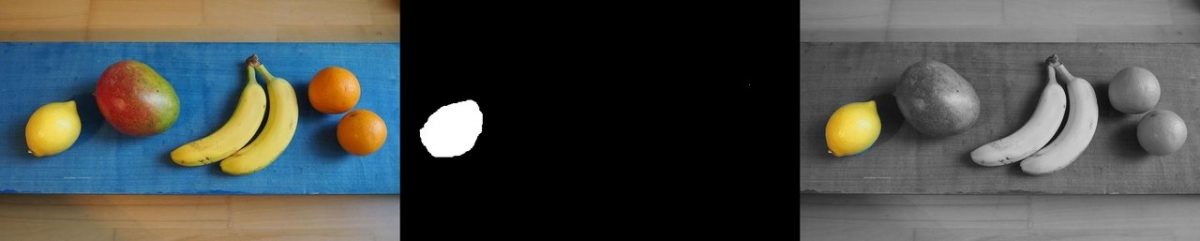
You want to highlight the apple in the image by applying a mask. The desired output is as follows.

You also want to see the process it took to get to that output image above. In other words, you want to have the program output, not only the masked image (as above), but also a table that shows all the steps involved: input image -> mask -> output.

To implement what I’ve described above, you will require two programs: common.py and image_masking.py.
common.py is a helper program. image_masking.py is the main driver program. To run it, you will type:
python image_masking.py []
For example,
python image_masking.py apple.jpg
Here is the code. I recommend:
- Copying and pasting both programs into a directory.
- Put your input images into that same directory.
- Run the image_masking.py program.
image_masking.py
#!/usr/bin/env python
'''
Welcome to the Image Masking Program!
This program allows users to highlight a specific
object within an image by masking it.
Usage:
image_masking.py [<image>]
Keys:
r - mask the image
SPACE - reset the inpainting mask
ESC - exit
'''
# Python 2/3 compatibility
from __future__ import print_function
import cv2 # Import the OpenCV library
import numpy as np # Import Numpy library
import matplotlib.pyplot as plt # Import matplotlib functionality
import sys # Enables the passing of arguments
from common import Sketcher
# Project: Image Masking Using OpenCV
# Author: Addison Sears-Collins
# Date created: 9/18/2019
# Python version: 3.7
# Description: This program allows users to highlight a specific
# object within an image by masking it.
# Define the file name of the image
INPUT_IMAGE = "fruits.jpg"
IMAGE_NAME = INPUT_IMAGE[:INPUT_IMAGE.index(".")]
OUTPUT_IMAGE = IMAGE_NAME + "_output.jpg"
TABLE_IMAGE = IMAGE_NAME + "_table.jpg"
def main():
"""
Main method of the program.
"""
# Pull system arguments
try:
fn = sys.argv[1]
except:
fn = INPUT_IMAGE
# Load the image and store into a variable
image = cv2.imread(cv2.samples.findFile(fn))
if image is None:
print('Failed to load image file:', fn)
sys.exit(1)
# Create an image for sketching the mask
image_mark = image.copy()
sketch = Sketcher('Image', [image_mark], lambda : ((255, 255, 255), 255))
# Sketch a mask
while True:
ch = cv2.waitKey()
if ch == 27: # ESC - exit
break
if ch == ord('r'): # r - mask the image
break
if ch == ord(' '): # SPACE - reset the inpainting mask
image_mark[:] = image
sketch.show()
# define range of white color in HSV
lower_white = np.array([0,0,255])
upper_white = np.array([255,255,255])
# Create the mask
mask = cv2.inRange(image_mark, lower_white, upper_white)
# Create the inverted mask
mask_inv = cv2.bitwise_not(mask)
# Convert to grayscale image
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Extract the dimensions of the original image
rows, cols, channels = image.shape
image = image[0:rows, 0:cols]
# Bitwise-OR mask and original image
colored_portion = cv2.bitwise_or(image, image, mask = mask)
colored_portion = colored_portion[0:rows, 0:cols]
# Bitwise-OR inverse mask and grayscale image
gray_portion = cv2.bitwise_or(gray, gray, mask = mask_inv)
gray_portion = np.stack((gray_portion,)*3, axis=-1)
# Combine the two images
output = colored_portion + gray_portion
# Save the image
cv2.imwrite(OUTPUT_IMAGE, output)
# Create a table showing input image, mask, and output
mask = np.stack((mask,)*3, axis=-1)
table_of_images = np.concatenate((image, mask, output), axis=1)
cv2.imwrite(TABLE_IMAGE, table_of_images)
# Display images, used for debugging
#cv2.imshow('Original Image', image)
#cv2.imshow('Sketched Mask', image_mark)
#cv2.imshow('Mask', mask)
#cv2.imshow('Output Image', output)
cv2.imshow('Table of Images', table_of_images)
cv2.waitKey(0) # Wait for a keyboard event
if __name__ == '__main__':
print(__doc__)
main()
cv2.destroyAllWindows()
common.py
#!/usr/bin/env python
'''
This module contains some common routines used by other samples.
'''
# Python 2/3 compatibility
from __future__ import print_function
import sys
PY3 = sys.version_info[0] == 3
if PY3:
from functools import reduce
import numpy as np
import cv2 as cv
# built-in modules
import os
import itertools as it
from contextlib import contextmanager
image_extensions = ['.bmp', '.jpg', '.jpeg', '.png', '.tif', '.tiff', '.pbm', '.pgm', '.ppm']
class Bunch(object):
def __init__(self, **kw):
self.__dict__.update(kw)
def __str__(self):
return str(self.__dict__)
def splitfn(fn):
path, fn = os.path.split(fn)
name, ext = os.path.splitext(fn)
return path, name, ext
def anorm2(a):
return (a*a).sum(-1)
def anorm(a):
return np.sqrt( anorm2(a) )
def homotrans(H, x, y):
xs = H[0, 0]*x + H[0, 1]*y + H[0, 2]
ys = H[1, 0]*x + H[1, 1]*y + H[1, 2]
s = H[2, 0]*x + H[2, 1]*y + H[2, 2]
return xs/s, ys/s
def to_rect(a):
a = np.ravel(a)
if len(a) == 2:
a = (0, 0, a[0], a[1])
return np.array(a, np.float64).reshape(2, 2)
def rect2rect_mtx(src, dst):
src, dst = to_rect(src), to_rect(dst)
cx, cy = (dst[1] - dst[0]) / (src[1] - src[0])
tx, ty = dst[0] - src[0] * (cx, cy)
M = np.float64([[ cx, 0, tx],
[ 0, cy, ty],
[ 0, 0, 1]])
return M
def lookat(eye, target, up = (0, 0, 1)):
fwd = np.asarray(target, np.float64) - eye
fwd /= anorm(fwd)
right = np.cross(fwd, up)
right /= anorm(right)
down = np.cross(fwd, right)
R = np.float64([right, down, fwd])
tvec = -np.dot(R, eye)
return R, tvec
def mtx2rvec(R):
w, u, vt = cv.SVDecomp(R - np.eye(3))
p = vt[0] + u[:,0]*w[0] # same as np.dot(R, vt[0])
c = np.dot(vt[0], p)
s = np.dot(vt[1], p)
axis = np.cross(vt[0], vt[1])
return axis * np.arctan2(s, c)
def draw_str(dst, target, s):
x, y = target
cv.putText(dst, s, (x+1, y+1), cv.FONT_HERSHEY_PLAIN, 1.0, (0, 0, 0), thickness = 2, lineType=cv.LINE_AA)
cv.putText(dst, s, (x, y), cv.FONT_HERSHEY_PLAIN, 1.0, (255, 255, 255), lineType=cv.LINE_AA)
class Sketcher:
def __init__(self, windowname, dests, colors_func):
self.prev_pt = None
self.windowname = windowname
self.dests = dests
self.colors_func = colors_func
self.dirty = False
self.show()
cv.setMouseCallback(self.windowname, self.on_mouse)
def show(self):
cv.imshow(self.windowname, self.dests[0])
def on_mouse(self, event, x, y, flags, param):
pt = (x, y)
if event == cv.EVENT_LBUTTONDOWN:
self.prev_pt = pt
elif event == cv.EVENT_LBUTTONUP:
self.prev_pt = None
if self.prev_pt and flags & cv.EVENT_FLAG_LBUTTON:
for dst, color in zip(self.dests, self.colors_func()):
cv.line(dst, self.prev_pt, pt, color, 5)
self.dirty = True
self.prev_pt = pt
self.show()
# palette data from matplotlib/_cm.py
_jet_data = {'red': ((0., 0, 0), (0.35, 0, 0), (0.66, 1, 1), (0.89,1, 1),
(1, 0.5, 0.5)),
'green': ((0., 0, 0), (0.125,0, 0), (0.375,1, 1), (0.64,1, 1),
(0.91,0,0), (1, 0, 0)),
'blue': ((0., 0.5, 0.5), (0.11, 1, 1), (0.34, 1, 1), (0.65,0, 0),
(1, 0, 0))}
cmap_data = { 'jet' : _jet_data }
def make_cmap(name, n=256):
data = cmap_data[name]
xs = np.linspace(0.0, 1.0, n)
channels = []
eps = 1e-6
for ch_name in ['blue', 'green', 'red']:
ch_data = data[ch_name]
xp, yp = [], []
for x, y1, y2 in ch_data:
xp += [x, x+eps]
yp += [y1, y2]
ch = np.interp(xs, xp, yp)
channels.append(ch)
return np.uint8(np.array(channels).T*255)
def nothing(*arg, **kw):
pass
def clock():
return cv.getTickCount() / cv.getTickFrequency()
@contextmanager
def Timer(msg):
print(msg, '...',)
start = clock()
try:
yield
finally:
print("%.2f ms" % ((clock()-start)*1000))
class StatValue:
def __init__(self, smooth_coef = 0.5):
self.value = None
self.smooth_coef = smooth_coef
def update(self, v):
if self.value is None:
self.value = v
else:
c = self.smooth_coef
self.value = c * self.value + (1.0-c) * v
class RectSelector:
def __init__(self, win, callback):
self.win = win
self.callback = callback
cv.setMouseCallback(win, self.onmouse)
self.drag_start = None
self.drag_rect = None
def onmouse(self, event, x, y, flags, param):
x, y = np.int16([x, y]) # BUG
if event == cv.EVENT_LBUTTONDOWN:
self.drag_start = (x, y)
return
if self.drag_start:
if flags & cv.EVENT_FLAG_LBUTTON:
xo, yo = self.drag_start
x0, y0 = np.minimum([xo, yo], [x, y])
x1, y1 = np.maximum([xo, yo], [x, y])
self.drag_rect = None
if x1-x0 > 0 and y1-y0 > 0:
self.drag_rect = (x0, y0, x1, y1)
else:
rect = self.drag_rect
self.drag_start = None
self.drag_rect = None
if rect:
self.callback(rect)
def draw(self, vis):
if not self.drag_rect:
return False
x0, y0, x1, y1 = self.drag_rect
cv.rectangle(vis, (x0, y0), (x1, y1), (0, 255, 0), 2)
return True
@property
def dragging(self):
return self.drag_rect is not None
def grouper(n, iterable, fillvalue=None):
'''grouper(3, 'ABCDEFG', 'x') --> ABC DEF Gxx'''
args = [iter(iterable)] * n
if PY3:
output = it.zip_longest(fillvalue=fillvalue, *args)
else:
output = it.izip_longest(fillvalue=fillvalue, *args)
return output
def mosaic(w, imgs):
'''Make a grid from images.
w -- number of grid columns
imgs -- images (must have same size and format)
'''
imgs = iter(imgs)
if PY3:
img0 = next(imgs)
else:
img0 = imgs.next()
pad = np.zeros_like(img0)
imgs = it.chain([img0], imgs)
rows = grouper(w, imgs, pad)
return np.vstack(map(np.hstack, rows))
def getsize(img):
h, w = img.shape[:2]
return w, h
def mdot(*args):
return reduce(np.dot, args)
def draw_keypoints(vis, keypoints, color = (0, 255, 255)):
for kp in keypoints:
x, y = kp.pt
cv.circle(vis, (int(x), int(y)), 2, color)