
In this tutorial, we will explore ROS 2 Bag, a powerful tool for recording and playing back data in a ROS 2 system. We will learn about the purpose of ROS 2 Bag, its real-world applications, and how to use it effectively. By the end of this tutorial, you will be able to record data from your ROS 2 system, analyze the recorded data, play it back for various purposes, and convert it to a CSV file (i.e. comma-separated text file).
Prerequisites
- You have completed this tutorial: How to Simulate a Mobile Robot in Gazebo – ROS 2 Jazzy
All my code for this project is located here on GitHub.
Purpose of ROS 2 Bag
ROS 2 Bag allows you to record data from various topics and services in your ROS 2 system and store it in a file format called a “bag.” This recorded data can be later played back, analyzed, or used for debugging and testing purposes.
ROS 2 Bag is particularly useful when you need to capture data from sensors, robot states, or any other relevant information during runtime.
Real-World Applications
The following are several real-world applications of ROS 2 bag:
- Autonomous Vehicle Development: ROS 2 Bag can be used to record sensor data, such as LIDAR scans, camera images, and GPS information, during autonomous vehicle testing. This recorded data can be used for offline analysis, algorithm development, and simulation purposes.
- Robot Debugging: When troubleshooting issues with a robot, ROS 2 Bag can be used to record data from various topics during the occurrence of the problem. This recorded data can be analyzed later to identify the root cause of the issue and facilitate debugging efforts.
- Dataset Creation: ROS 2 Bag is often used to create datasets for machine learning and computer vision applications. By recording data from sensors and ground truth information, researchers can build datasets for tasks such as object detection, semantic segmentation, and localization.
I will be working with the mobile robot I set up in this tutorial. I want to record the velocity commands, and then play them back.
Setup
Open a terminal window, and launch your robot.
I will type the following command:
x3 or
bash ~/ros2_ws/src/yahboom_rosmaster/yahboom_rosmaster_bringup/scripts/rosmaster_x3_gazebo.shChoose a Topic
In another terminal window, type:
cd ~/Downloads/mkdir bag_files && cd bag_filesCheck out the active topics:
ros2 topic listThe /mecanum_drive_controller/cmd_vel topic contains the velocity messages.
ros2 bag record
Open a new terminal window, and move the robot in a square-shaped pattern using this command:
ros2 run yahboom_rosmaster_system_tests square_mecanum_controllerTo start recording data, use the ros2 bag record command followed by the topic(s) you want to record.
For example, to record the /mecanum_drive_controller/cmd_vel topic, run:
ros2 bag record /mecanum_drive_controller/cmd_velThe recording will start, and you will see output indicating the number of messages recorded for each topic.
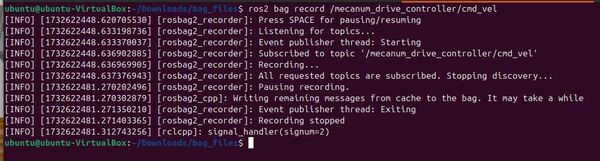
To stop the recording, press Ctrl + C in the terminal where the ros2 bag record command is running.
Close down the robot and the square mecanum controller as well using CTRL + C.
The recorded data will be saved in a bag file with a name format of rosbag2_year_month_day-hour_minute_second. This folder contains a metadata.yaml folder and the bag file.
dirHere is what I see:
rosbag2_2024_11_26-07_00_48The metadata.yaml file provides important information about the recorded bag file, such as the duration of the recording, the starting time, the number of messages recorded, and the details of each recorded topic. This metadata helps in understanding the contents of the bag file and can be useful for analysis and playback purposes.
If you want to record multiple topics and change the name of the topic, type the following command:
ros2 bag record -o <bag_file_name> <topic1> <topic2> ... <topicN>If you want to record all topics, you would type this command:
ros2 bag record -aYou can find other options here at the ROS 2 Bag GitHub page.
ros2 bag info
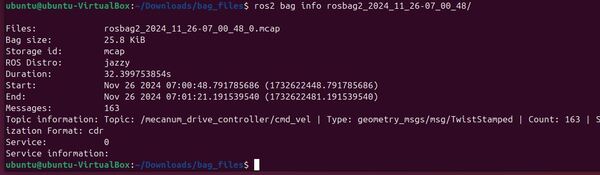
To view information about a recorded bag file, use the `ros2 bag info` command followed by the path to the bag file. For example:
ros2 bag info rosbag2_2024_11_26-07_00_48The command will display information such as the duration of the recording, the number of messages recorded for each topic, and the start and end times of the recording.
ros2 bag play
Open a terminal window, and launch your robot.
I will type the following command:
x3 or
bash ~/ros2_ws/src/yahboom_rosmaster/yahboom_rosmaster_bringup/scripts/rosmaster_x3_gazebo.shTo play back a recorded bag file, use the ros2 bag play command followed by the path to the bag file.
cd ~/Downloads/bag_filesRun the bag file:
ros2 bag play rosbag2_2024_11_26-07_00_48You can use the –loop option to play the bag file in a loop:
ros2 bag play rosbag2_2024_11_26-07_00_48 --loopLet’s play it in a loop.
The recorded data will be played back, and you will see the messages being published to the respective topic.
ros2 topic echo /mecanum_drive_controller/cmd_velYour robot will start moving as well.
To pause the playback, press the spacebar in the terminal where the ros2 bag play command is running. Your robot will continue based on the last velocity message it received.
Press the spacebar again to resume playback.
To stop the playback, press Ctrl+C in all terminal windows.
Convert the ROS 2 Bag File to a CSV File
Let’s convert the ROS 2 bag file into CSV format.
cd ~/Downloads/bag_files/rosbag2_2024_11_26-07_00_48If you take a look inside the ROS 2 bag folder, you see two files.
- rosbag2_2024_11_26-07_00_48_0.mcap: The ROS 2 bag file
- metadata.yaml: This is a supplementary file that provides extra detail about the data in the .mcap file. It is written in YAML format to make it easy for both humans and computers to read and understand.
Now let’s convert the ROS 2 bag file (in mcap format, the default for ROS 2) into .csv format.
First, type this command to install the package we need (it is usually already installed):
sudo apt-get install ros-${ROS_DISTRO}-rosbag2-storage-mcapcd ~/Downloads/bag_files/Create a new file called ros2bag_to_csv.py.
Add this code.
#!/usr/bin/env python3
"""
Convert a ROS 2 bag file to CSV format.
This script reads messages from a ROS 2 bag file and converts them to CSV format,
creating separate CSV files for each topic in the bag.
Usage:
python3 ros2bag_to_csv.py <input_bag_path> <output_folder>
Subscription Topics:
None (reads from bag file)
Publishing Topics:
None (writes to CSV files)
:author: Addison Sears-Collins
:date: November 26, 2024
"""
import argparse
import csv
import os
from rclpy.serialization import deserialize_message
from rosidl_runtime_py.utilities import get_message
import rosbag2_py
from std_msgs.msg import String
def read_messages(input_bag: str):
"""
Read messages from a ROS 2 bag file.
:param input_bag: Path to the input bag file.
:return: A generator yielding (topic, message, timestamp) tuples.
"""
# Create a SequentialReader to read messages from the bag file
reader = rosbag2_py.SequentialReader()
# Open the bag file for reading
reader.open(
rosbag2_py.StorageOptions(uri=input_bag, storage_id="mcap"),
rosbag2_py.ConverterOptions(
input_serialization_format="cdr", output_serialization_format="cdr"
),
)
# Get all the topic types available in the bag file
topic_types = reader.get_all_topics_and_types()
def typename(topic_name):
"""
Get the message type for a given topic.
:param topic_name: The name of the topic.
:return: The message type as a string.
:raises ValueError: If the topic is not found in the bag.
"""
# Iterate through the topic types to find the matching topic name
for topic_type in topic_types:
if topic_type.name == topic_name:
return topic_type.type
raise ValueError(f"topic {topic_name} not in bag")
# Iterate through the messages in the bag file
while reader.has_next():
topic, data, timestamp = reader.read_next()
msg_type = get_message(typename(topic))
msg = deserialize_message(data, msg_type)
yield topic, msg, timestamp
# Clean up the reader
del reader
def main():
"""
Main function to parse arguments and convert ROS 2 bag to CSV.
"""
# Create an argument parser
parser = argparse.ArgumentParser(description="Convert ROS 2 bag to CSV")
parser.add_argument("input", help="Input bag path (folder) to read from")
parser.add_argument("output", help="Output folder to save CSV files")
# Parse the command-line arguments
args = parser.parse_args()
# Create the output folder if it doesn't exist
if not os.path.exists(args.output):
os.makedirs(args.output)
# Initialize dictionaries to store topic files and writers
topic_files = {}
topic_writers = {}
# Iterate through the messages in the bag file
for topic, msg, timestamp in read_messages(args.input):
# If the topic hasn't been processed before, create a new CSV file and writer
if topic not in topic_files:
output_file = os.path.join(args.output, topic.replace('/', '_') + '.csv')
topic_files[topic] = open(output_file, mode='w',
newline='', encoding='utf-8')
topic_writers[topic] = csv.writer(topic_files[topic])
topic_writers[topic].writerow(['timestamp', 'data'])
# Write the message data to the corresponding CSV file
if isinstance(msg, String):
topic_writers[topic].writerow([timestamp, msg.data])
else:
topic_writers[topic].writerow([timestamp, str(msg)])
# Close all the topic files
for file in topic_files.values():
file.close()
if __name__ == "__main__":
main()
Save the file.
Change the file’s permissions:
chmod +x ros2bag_to_csv.py Run the script:
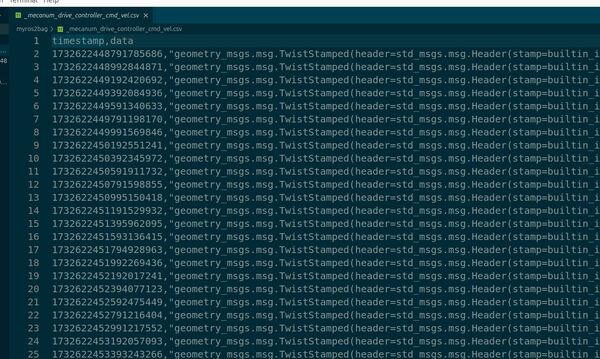
python3 ros2bag_to_csv.py rosbag2_2024_11_26-07_00_48 myros2bagHere is the syntax:
python3 ros2bag_to_csv.py <ROS 2 bag folder> <desired output folder>cd myros2bagInside this folder you will see your .csv file.
That’s it!
You can now use this knowledge to capture and analyze data from your ROS 2 system, debug issues, and create datasets for various applications.
Keep building!