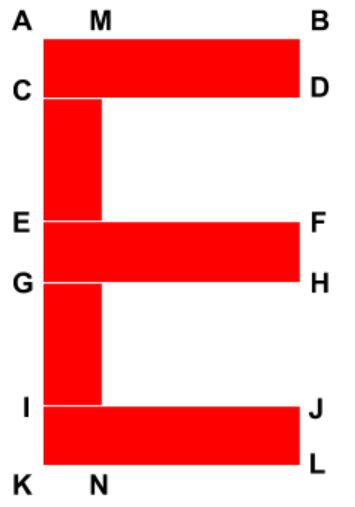
Here are the critical reference points for the letter E. These points mark the corners of the four rectangles that make up the letter E.
#!/usr/bin/env python
# coding: utf-8
# # Project 1 – Introduction to Python scikit-image
#
# ## Author
# Addison Sears-Collins
# ## Date Created
# 9/4/2019
# ## Python Version
# 3.7
# ## Description
# This program draws an E at the center of an input image.
# ## Purpose
# The purpose of this assignment is to introduce the basic functions of the Python scikit-image
# library -- a simple and popular open source library for image processing in Python. The scikitimage
# extends scipy.ndimage to provide a set of image processing routines including I/O, color
# and geometric transformations, segmentation, and other basic features.
# ## File Path
# In[1]:
# Move to the directory where the input images are located
get_ipython().run_line_magic('cd', 'D:\\Dropbox\\work')
# List the files in that directory
get_ipython().run_line_magic('ls', '')
# ## Code
# In[2]:
# Import scikit-image
import skimage
# Import module to read and write images in various formats
from skimage import io
# Import matplotlib functionality
import matplotlib.pyplot as plt
# Import numpy
import numpy as np
# Set the color of the E
# [red, green, blue]
COLOR_OF_E = [255, 0, 0]
# In[3]:
# Show the critical points of E
from IPython.display import Image
Image(filename = "e_critical_points.PNG", width = 200, height = 200)
# In[4]:
def e_generator(y_dim, x_dim):
"""
Generates the coordinates of the E
:param y_dim int: The y dimensions of the input image
:param x_dim int: The x dimensions of the input image
:return: The critical coordinates
:rtype: list
"""
# Set all the critical points
A = [int(0.407 * y_dim), int(0.423 * x_dim)]
B = [int(0.407 * y_dim), int(0.589 * x_dim)]
C = [int(0.488 * y_dim), int(0.423 * x_dim)]
D = [int(0.488 * y_dim), int(0.589 * x_dim)]
E = [int(0.572 * y_dim), int(0.423 * x_dim)]
F = [int(0.572 * y_dim), int(0.581 * x_dim)]
G = [int(0.657 * y_dim), int(0.423 * x_dim)]
H = [int(0.657 * y_dim), int(0.581 * x_dim)]
I = [int(0.735 * y_dim), int(0.423 * x_dim)]
J = [int(0.735 * y_dim), int(0.589 * x_dim)]
K = [int(0.819 * y_dim), int(0.423 * x_dim)]
L = [int(0.819 * y_dim), int(0.589 * x_dim)]
M = [int(0.407 * y_dim), int(0.47 * x_dim)]
N = [int(0.819 * y_dim), int(0.47 * x_dim)]
return A,B,C,D,E,F,G,H,I,J,K,L,M,N
# In[5]:
def plot_image_with_e(image, A, B, C, D, E, F, G, H, I, J, K, L, M, N):
"""
Plots an E on an input image
:param image: The input image
:param A, B, etc. list: The coordinates of the critical points
:return: image_with_e
:rtype: image
"""
# Copy the image
image_with_e = np.copy(image)
# Top horizontal rectangle
image_with_e[A[0]:C[0], A[1]:B[1], :] = COLOR_OF_E
# Middle horizontal rectangle
image_with_e[E[0]:G[0], E[1]:F[1], :] = COLOR_OF_E
# Bottom horizontal rectangle
image_with_e[I[0]:K[0], I[1]:J[1], :] = COLOR_OF_E
# Vertical connector rectangle
image_with_e[A[0]:K[0], A[1]:M[1], :] = COLOR_OF_E
# Display image
plt.imshow(image_with_e);
return image_with_e
# In[6]:
def print_image_details(image):
"""
Prints the details of an input image
:param image: The input image
"""
print("Size: ", image.size)
print("Shape: ", image.shape)
print("Type: ", image.dtype)
print("Max: ", image.max())
print("Min: ", image.min())
# In[7]:
def compare(original_image, annotated_image):
"""
Compare two images side-by-side
:param original_image: The original input image
:param annotated_image: The annotated-version of the original input image
"""
# Compare the two images side-by-side
f, (ax0, ax1) = plt.subplots(1, 2, figsize=(20,10))
ax0.imshow(original_image)
ax0.set_title('Original', fontsize = 18)
ax0.axis('off')
ax1.imshow(annotated_image)
ax1.set_title('Annotated', fontsize = 18)
ax1.axis('off')
# In[8]:
# Load the test image
image = io.imread("test_image.jpg")
# Store the y and x dimensions of the input image
y_dimensions = image.shape[0]
x_dimensions = image.shape[1]
# Print the image details
print_image_details(image)
# Display the image
plt.imshow(image);
# In[9]:
# Set all the critical points of the image
A,B,C,D,E,F,G,H,I,J,K,L,M,N = e_generator(y_dimensions, x_dimensions)
# Plot the image with E and store it
image_with_e = plot_image_with_e(image, A, B, C, D, E, F, G, H, I, J, K, L, M, N)
# Save the output image
plt.imsave('test_image_annotated.jpg', image_with_e)
# In[10]:
compare(image, image_with_e)
# In[11]:
# Load the first image
image = io.imread("architecture_roof_buildings_baked.jpg")
# Store the y and x dimensions of the input image
y_dimensions = image.shape[0]
x_dimensions = image.shape[1]
# Print the image details
print_image_details(image)
# Display the image
plt.imshow(image);
# In[12]:
# Set all the critical points of the image
A,B,C,D,E,F,G,H,I,J,K,L,M,N = e_generator(y_dimensions, x_dimensions)
# Plot the image with E and store it
image_with_e = plot_image_with_e(image, A, B, C, D, E, F, G, H, I, J, K, L, M, N)
# Save the output image
plt.imsave('architecture_roof_buildings_baked_annotated.jpg', image_with_e)
# In[13]:
compare(image, image_with_e)
# In[14]:
# Load the second image
image = io.imread("statue.jpg")
# Store the y and x dimensions of the input image
y_dimensions = image.shape[0]
x_dimensions = image.shape[1]
# Print the image details
print_image_details(image)
# Display the image
plt.imshow(image);
# In[15]:
# Set all the critical points of the image
A,B,C,D,E,F,G,H,I,J,K,L,M,N = e_generator(y_dimensions, x_dimensions)
# Plot the image with E and store it
image_with_e = plot_image_with_e(image, A, B, C, D, E, F, G, H, I, J, K, L, M, N)
# Save the output image
plt.imsave('statue_annotated.jpg', image_with_e)
# In[16]:
compare(image, image_with_e)
# In[ ]: