Software in ROS is organized into packages (and packages exist inside the catkin_ws folder, your catkin workspace).
Each package might contain a mixture of code (e.g. ROS nodes), data, libraries, images, documentation, etc. Every program you write in ROS will need to be inside a package.
To find the path of a package, you use the rospack command. For example, let’s find the path of the turtlesim package, a pre-installed ROS package.
Up until now, when we wanted to run a ros node, we:
Opened a terminal window
Typed roscore
Opened another terminal window
Typed rosrun <name_of_package> <name_of_node>
Running one or two nodes is fine this way. However, imagine if you had to run 30 nodes. You would have to open 30 separate terminal windows just to run each node!
Fortunately, there is a better way. ROS has a tool called the launch file that enables you to launch more than one node at the same time.
A launch file is in a special format called XML format. It is in this file that you will list the nodes that you would like the ROS system to launch simultaneously.
Let’s look at how to create a launch file in ROS that launches two nodes at the same time. We will launch simple_publisher_node and simple_subscriber_node that exist inside the noetic_basics_part_1 package.
First, open a new terminal window.
Go to your package folder.
roscd noetic_basics_part_1
Create a new folder named, launch.
mkdir launch
Move into that directory.
cd launch
Open a new file named noetic_basics_part_1.launch.
gedit noetic_basics_part_1.launch
Type the following code in the file, and then click Save.
pkg and type let us know which program ROS needs to run. These two lines are equivalent to what you would type in the terminal window manually using the rosrun command.
For example, in this command:
rosrun noetic_basics_part_1 simple_publisher_node
pkg is the name of the package…in this case, noetic_basics_part_1.
type is the name of the executable file we want ROS to run…in this case, simple_publisher_node.
Remember you can see all your executables in the ~/catkin_ws/devel/lib/noetic_basics_part_1/ folder. These executables were created from your C++ programs (.cpp) when you typed the catkin_make command.
name assigns a name to the node. This name overrides that name that the node (i.e. C++ program we wrote earlier in this tutorial) would usually have due to the ros::init call. I kept the name as-is.
Finally, we have the output=”screen” element. This element tells ROS to display the output to the terminal window instead of inside special files called log files (which are inside the ~/.ros/log directory).
Now that we’ve created the launch file, let’s run it. The syntax for running a launch file is as follows:
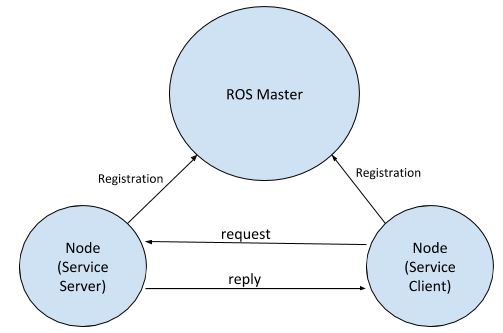
What is a ROS Service? A ROS Service consists of a pair of messages: one for the request and one for the reply. A service-providing ROS node (i.e. Service Server) offers a service (e.g. read sensor data).
A client node (i.e. Service Client) calls the service by sending a request message to the service provider. The client node then awaits the reply.
Here is what the ROS Service model looks like:
In ROS, a service is defined using .srv files.
Let’s create a service now. We need to create a service server and a service client. In this example, the service server provides the service of adding two numbers together. A service client calls this service by sending the server the two numbers it wants to add. The response from the service server will be the sum of those two numbers.
Open a new terminal window, and go to the noetic_basics_part_1 package.
roscd noetic_basics_part_1
Create a folder named srv.
mkdir srv
See if the folder was created.
dir
Now move into that folder.
cd srv
Inside the srv folder, create a file named noetic_basics_part_1_srv.srv.
gedit noetic_basics_part_1_srv.srv
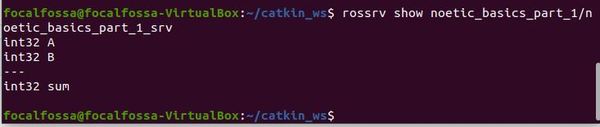
Add the following lines to the file. int32 A and int32 B are the two data types and values that the service client will provide to the service provider.
int32 sum will be the response from the service provider (i.e. the sum of the signed 32-bit integers A and B).
int32 A
int32 B
---
int32 sum
Click Save and close the text editor.
Now go back up one directory.
cd ..
Open the package.xml file. The package.xml file defines the properties of a package like package name, version number, author, maintainer, dependencies on other packages, etc.
Now open the CMakeLists.txt file. Remember this file contains instructions on how to build the code inside the package.
gedit CMakeLists.txt
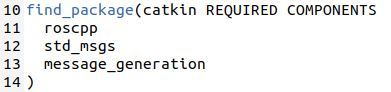
Make sure you put message_generation into the find_package scope.
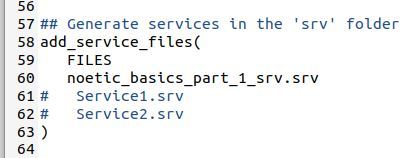
Now uncomment the add_service_file lines.
Add the name of the new .srv file you created.
noetic_basics_part_1_srv.srv
Now make sure these lines are uncommented.
Save the CMakeLists.txt file and close it to return to the terminal window.
Let’s build the package to make sure all the changes we’ve made are incorporated.
cd ~/catkin_ws/
catkin_make
Let’s see if everything was built properly.
rossrv show noetic_basics_part_1/noetic_basics_part_1_srv
Now that we have created the service data type, we need to create two nodes: a service server and a service client.
We will create two files:
simple_service_server.cpp
simple_service_client.cpp
Open up a new terminal window.
Move to the src folder of the package we created earlier called noetic_basics_part_1.
roscd noetic_basics_part_1/src
Let’s create a C++ program named simple_service_server.cpp.
Type this command to open a brand new C++ file.
gedit simple_service_server.cpp
Type the code below into the file.
/**
* A basic program for a Service Server in ROS
* @author Addison Sears-Collins (https://automaticaddison.com/)
* @version 1.0
*/
// Include the header file that has declarations for the standard ROS classes
#include "ros/ros.h"
// Include the srv file that we already created
#include "noetic_basics_part_1/noetic_basics_part_1_srv.h"
// Add two numbers and output the sum
bool add(noetic_basics_part_1::noetic_basics_part_1_srv::Request &req,
noetic_basics_part_1::noetic_basics_part_1_srv::Response &res) {
res.sum = req.A + req.B;
ROS_INFO("Request: A=%d, B=%d", (int)req.A, (int)req.B);
ROS_INFO("Response: [%d]", (int)res.sum);
return true;
}
// Main ROS method
int main(int argc, char **argv) {
// Initialize the node and set the name
ros::init(argc, argv, "adder_server");
// Create the main access point for the node
// This piece of code enables the node to communicate with the ROS system.
ros::NodeHandle n;
// Create the service and advertise it to the ROS computational network
ros::ServiceServer service = n.advertiseService("noetic_basics_part_1/adder", add);
// Print message to terminal window
ROS_INFO("adder_server has started");
// Keep processing information over and over again
ros::spin();
// Program completed successfully
return 0;
}
Click Save and close the editor.
Now type this command to open a brand new C++ file.
gedit simple_service_client.cpp
/**
* A basic program for a Service Client in ROS
* @author Addison Sears-Collins (https://automaticaddison.com/)
* @version 1.0
*/
#include "ros/ros.h"
#include "noetic_basics_part_1/noetic_basics_part_1_srv.h"
// This header is for the C standard general utilities library
// It defines some general purpose functions such as integer arithmetic
#include <cstdlib>
int main(int argc, char **argv) {
// Initialize the node and set the name
ros::init(argc, argv, "adder_client");
// argc is the count of the number of arguments passed in the command line
// For example, if you're adding two numbers, the three arguments in the
// Linux terminal would be the stuff in between []:
// rosrun <package_name> [client_name] [1st_number] [2nd_number]
// This code below checks that there are three arguments passed in the command
// line. If there aren't a message is printed to the terminal window.
if (argc != 3) {
ROS_INFO("Usage: adder_client A B ");
return 1;
}
// Create the main access point for the node
// This piece of code enables the node to communicate with the ROS system.
ros::NodeHandle n;
// Create a client for the service named noetic_basics_part_1/adder
ros::ServiceClient client = n.serviceClient<noetic_basics_part_1::noetic_basics_part_1_srv>("noetic_basics_part_1/adder");
// Create an instance of the srv request type
noetic_basics_part_1::noetic_basics_part_1_srv srv;
// Fill in the two values that will be sent to the Service Server
srv.request.A = atoll(argv[1]);
srv.request.B = atoll(argv[2]);
// Call the service, and send the data
if (client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service adder_server");
return 1;
}
return 0;
}
Click Save and close the editor.
Let’s edit the CMakeLists.txt file for the noetic_basics_part_1 package. Open a new terminal window, and type this command:
roscd noetic_basics_part_1
gedit CMakeLists.txt
Now add these lines to the bottom of the CMakeLists.txt file: