
The rqt tool in ROS enables us to visualize the node connections while a launch file is running. Let’s see what happens when we run the launch file we created in this tutorial. Open up a new terminal window.
Directions
Type:
roslaunch hello_world talker_listener.launch
Then in a new terminal window, type:
rqt_graph
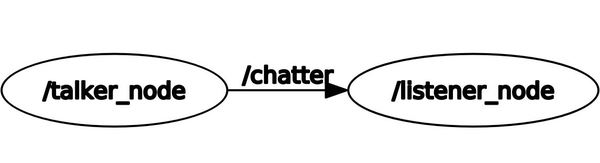
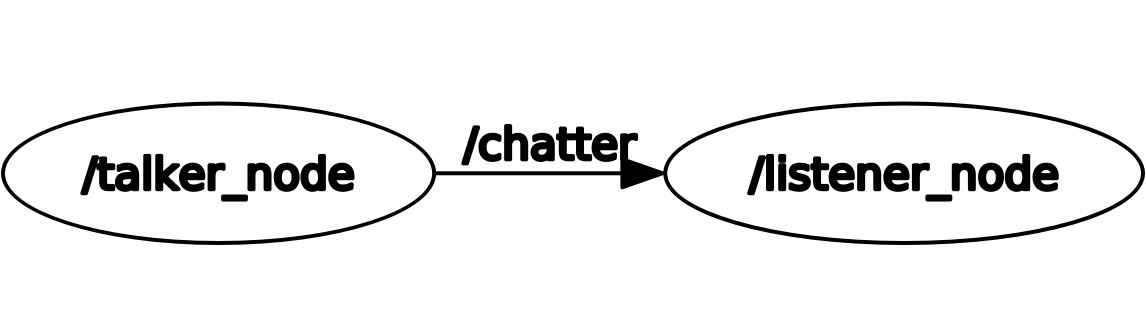
You can see that the listener_node is subscribed to the /chatter topic. The talker_node is publishing to the /chatter topic. You might also see another node called /rosout (if you don’t see /rosout that is OK). This is where debug statements from nodes are going.