
In this tutorial, I will show you how to install MoveIt 2 for ROS 2 Foxy Fitzroy. MoveIt 2 is a popular software platform for controlling robotic arms (industrial, humanoid, and collaborative).
The official tutorial is located in the MoveIt 2 documentation, but we’ll run through the entire process step-by-step below.
You Will Need
In order to complete this tutorial, you will need:
Update the Package List
The first thing you need to do is make sure you have the latest version of packages installed. Open a new terminal window, and type the following commands, one after the other.
sudo apt update
Upgrade any outdated packages
sudo apt dist-upgrade
Type Y, and then press Enter.
Update ROS dependencies.
rosdep update
Add Various ROS 2 Build Tools
Add some other build tools that Move It 2 needs. Copy and paste the full command below into your Linux terminal and then press Enter.
sudo apt install -y \
build-essential \
cmake \
git \
libbullet-dev \
python3-colcon-common-extensions \
python3-flake8 \
python3-pip \
python3-pytest-cov \
python3-rosdep \
python3-setuptools \
python3-vcstool \
wget \
clang-format-10 && \
# install some pip packages needed for testing
python3 -m pip install -U \
argcomplete \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-docstrings \
flake8-import-order \
flake8-quotes \
pytest-repeat \
pytest-rerunfailures \
pytest
Create a Workspace
Let’s create a workspace for our MoveIt 2 work. Open a new terminal, and type the following commands:
export COLCON_WS=~/ws_moveit2/
mkdir -p $COLCON_WS/src
cd $COLCON_WS/src
Download MoveIt 2
Download the MoveIt 2 repository.
wget https://raw.githubusercontent.com/ros-planning/moveit2/main/moveit2.repos
Now run this command. Be patient as it will take a while for this command to complete. Feel free to go get something to eat or drink.
vcs import < moveit2.repos

Make sure MoveIt 2 has all the dependencies it needs. This command below will also take several minutes to complete.
rosdep install -r --from-paths . --ignore-src --rosdistro foxy -y

Build MoveIt 2
Move to the root of the workspace.
cd $COLCON_WS
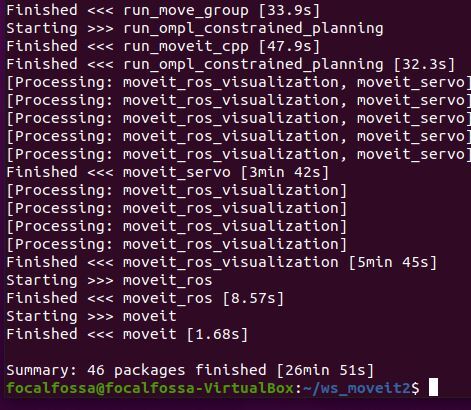
Build MoveIt 2. This command below will take a while to complete. Mine took 26 minutes and 51 seconds.
colcon build --event-handlers desktop_notification- status- --cmake-args -DCMAKE_BUILD_TYPE=Release
Here is what my terminal looks like after the build.
Source the Setup File for the Workspace
Open your .bashrc file, and add the following line to the very bottom of the file:
source ~/ws_moveit2/install/setup.bash
Test Your Installation
Open a new terminal window, and type the following commands to launch the demo.
cd ~/ws_moveit2ros2 launch run_move_group run_move_group.launch.py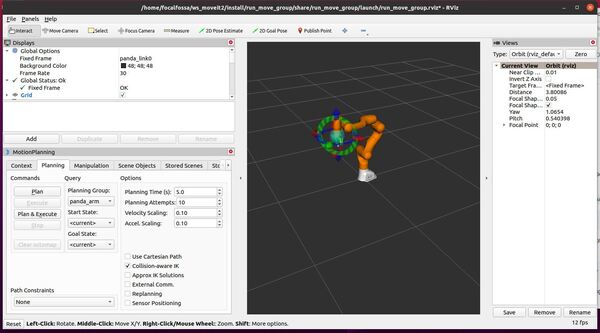
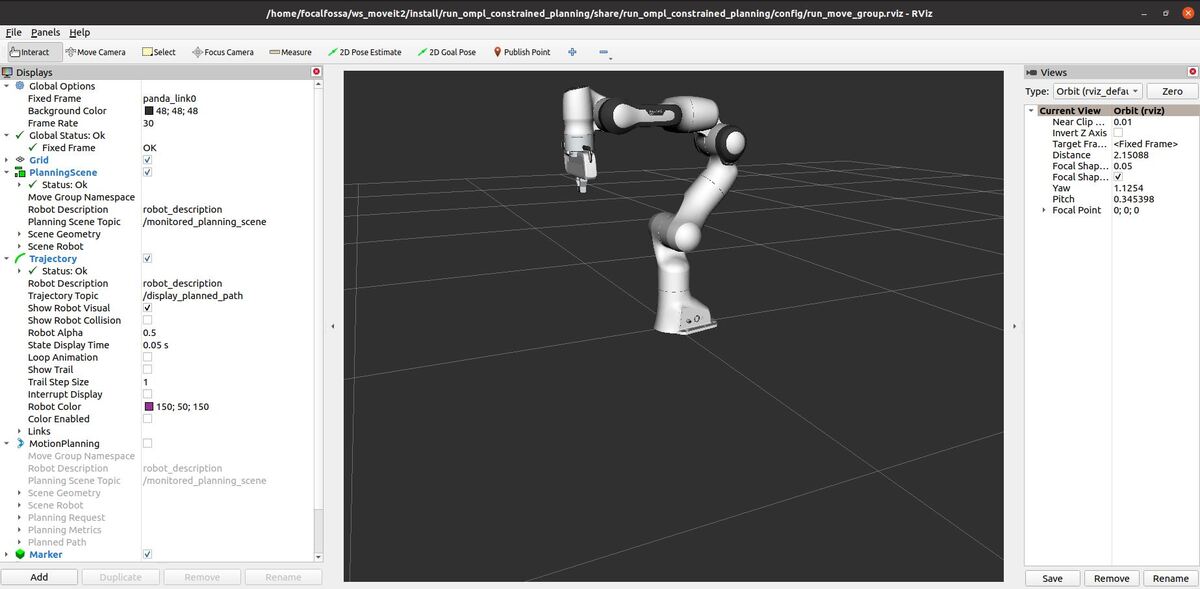
Here is another command you can run:
ros2 launch run_ompl_constrained_planning run_move_group.launch.pyHere is the output:
When you are finished, press CTRL + C in all terminal windows to shut everything down.