
In this tutorial, I will show you how to detect an ArUco Marker in a real-time video stream (i.e. my webcam) using OpenCV (Python). I will follow this tutorial.
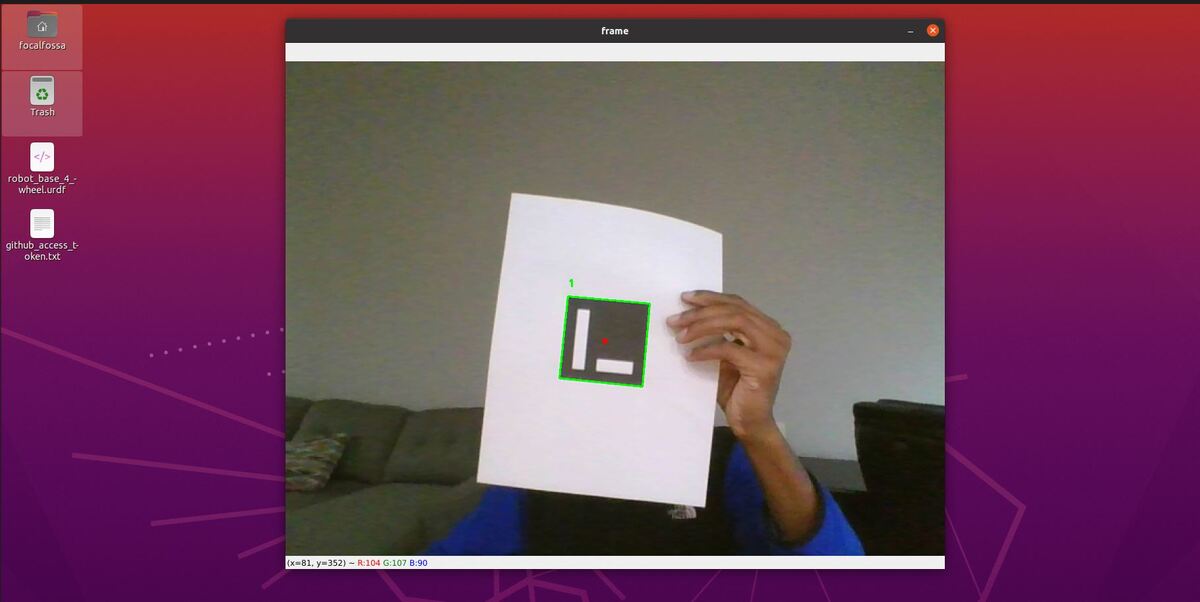
By the end of this tutorial, you will be able to generate output like this:
Prerequisites
- You have created an ArUco marker.
- You have OpenCV (Python) installed on your system (pip3 install opencv-contrib-python==4.6.0.66).
- (Optional) You are able to run the code on this tutorial without any problems.
Create the Code
Open your favorite code editor, and write the following code. I will name my program detect_aruco_marker.py. This program detects an ArUco marker in a real-time video stream (we’ll use the built-in webcam).
#!/usr/bin/env python
'''
Welcome to the ArUco Marker Detector!
This program:
- Detects ArUco markers using OpenCV and Python
'''
from __future__ import print_function # Python 2/3 compatibility
import cv2 # Import the OpenCV library
import numpy as np # Import Numpy library
# Project: ArUco Marker Detector
# Date created: 12/18/2021
# Python version: 3.8
# Reference: https://www.pyimagesearch.com/2020/12/21/detecting-aruco-markers-with-opencv-and-python/
desired_aruco_dictionary = "DICT_ARUCO_ORIGINAL"
# The different ArUco dictionaries built into the OpenCV library.
ARUCO_DICT = {
"DICT_4X4_50": cv2.aruco.DICT_4X4_50,
"DICT_4X4_100": cv2.aruco.DICT_4X4_100,
"DICT_4X4_250": cv2.aruco.DICT_4X4_250,
"DICT_4X4_1000": cv2.aruco.DICT_4X4_1000,
"DICT_5X5_50": cv2.aruco.DICT_5X5_50,
"DICT_5X5_100": cv2.aruco.DICT_5X5_100,
"DICT_5X5_250": cv2.aruco.DICT_5X5_250,
"DICT_5X5_1000": cv2.aruco.DICT_5X5_1000,
"DICT_6X6_50": cv2.aruco.DICT_6X6_50,
"DICT_6X6_100": cv2.aruco.DICT_6X6_100,
"DICT_6X6_250": cv2.aruco.DICT_6X6_250,
"DICT_6X6_1000": cv2.aruco.DICT_6X6_1000,
"DICT_7X7_50": cv2.aruco.DICT_7X7_50,
"DICT_7X7_100": cv2.aruco.DICT_7X7_100,
"DICT_7X7_250": cv2.aruco.DICT_7X7_250,
"DICT_7X7_1000": cv2.aruco.DICT_7X7_1000,
"DICT_ARUCO_ORIGINAL": cv2.aruco.DICT_ARUCO_ORIGINAL
}
def main():
"""
Main method of the program.
"""
# Check that we have a valid ArUco marker
if ARUCO_DICT.get(desired_aruco_dictionary, None) is None:
print("[INFO] ArUCo tag of '{}' is not supported".format(
args["type"]))
sys.exit(0)
# Load the ArUco dictionary
print("[INFO] detecting '{}' markers...".format(
desired_aruco_dictionary))
this_aruco_dictionary = cv2.aruco.Dictionary_get(ARUCO_DICT[desired_aruco_dictionary])
this_aruco_parameters = cv2.aruco.DetectorParameters_create()
# Start the video stream
cap = cv2.VideoCapture(0)
while(True):
# Capture frame-by-frame
# This method returns True/False as well
# as the video frame.
ret, frame = cap.read()
# Detect ArUco markers in the video frame
(corners, ids, rejected) = cv2.aruco.detectMarkers(
frame, this_aruco_dictionary, parameters=this_aruco_parameters)
# Check that at least one ArUco marker was detected
if len(corners) > 0:
# Flatten the ArUco IDs list
ids = ids.flatten()
# Loop over the detected ArUco corners
for (marker_corner, marker_id) in zip(corners, ids):
# Extract the marker corners
corners = marker_corner.reshape((4, 2))
(top_left, top_right, bottom_right, bottom_left) = corners
# Convert the (x,y) coordinate pairs to integers
top_right = (int(top_right[0]), int(top_right[1]))
bottom_right = (int(bottom_right[0]), int(bottom_right[1]))
bottom_left = (int(bottom_left[0]), int(bottom_left[1]))
top_left = (int(top_left[0]), int(top_left[1]))
# Draw the bounding box of the ArUco detection
cv2.line(frame, top_left, top_right, (0, 255, 0), 2)
cv2.line(frame, top_right, bottom_right, (0, 255, 0), 2)
cv2.line(frame, bottom_right, bottom_left, (0, 255, 0), 2)
cv2.line(frame, bottom_left, top_left, (0, 255, 0), 2)
# Calculate and draw the center of the ArUco marker
center_x = int((top_left[0] + bottom_right[0]) / 2.0)
center_y = int((top_left[1] + bottom_right[1]) / 2.0)
cv2.circle(frame, (center_x, center_y), 4, (0, 0, 255), -1)
# Draw the ArUco marker ID on the video frame
# The ID is always located at the top_left of the ArUco marker
cv2.putText(frame, str(marker_id),
(top_left[0], top_left[1] - 15),
cv2.FONT_HERSHEY_SIMPLEX,
0.5, (0, 255, 0), 2)
# Display the resulting frame
cv2.imshow('frame',frame)
# If "q" is pressed on the keyboard,
# exit this loop
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# Close down the video stream
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
print(__doc__)
main()
Save the file, and close it.
You need to have opencv-contrib-python installed and not opencv-python. Open a terminal window, and type:
pip uninstall opencv-python
pip3 install opencv-contrib-python==4.6.0.66
To run the program in Linux for example, type the following command:
python3 detect_aruco_marker.py
If you want to restore OpenCV to the previous version after you’re finished creating the ArUco markers, type:
pip uninstall opencv-contrib-python
pip install opencv-python
To set the changes, I recommend rebooting your computer.
That’s it. Keep building!