In this tutorial, we are going to learn about one of the core concepts of object-oriented programming: classes and objects.
Understanding how to use classes and objects is essential for structuring robust and maintainable code in robotics, where you often model real-world entities like robots, sensors, and actuators.
Prerequisites
- You have completed this tutorial: How to Handle Errors in Python.
Getting Comfortable with Classes and Objects
Let’s start by defining what a class is. Think of a class like a recipe for making cookies. Just as a recipe tells us what ingredients we need (these are called variables or attributes in programming) and what steps to follow (these are called methods or functions in programming), a class defines both the data and the actions that our program can use. The recipe itself isn’t a cookie – it’s just instructions, just like a class is just code until we use it.
An object is when you actually make the cookies using your recipe – in programming terms, we call this “instantiating a class.” When you just write down a recipe (define a class), you’re not using any real ingredients or kitchen space yet (no computer memory is used). But when you start baking (create an object), that’s when you use real ingredients and take up real counter space (the computer allocates actual memory for your object). Each batch of cookies you make from the same recipe is like creating a new object from your class – they use the same instructions but are separate, physical things in your kitchen (separate spots in computer memory).
Let’s create a simple class called Robot. This class will have some basic attributes like name and color, and a method that allows the robot to introduce itself.
Create a program called robot_class.py inside the following folder: ~/Documents/python_tutorial.
Write this code:
class Robot:
def __init__(self, name, color):
self.name = name
self.color = color
def introduce_self(self):
print(f"Hello, my name is {self.name} and my color is {self.color}.")
The __init__ method is a special method called a constructor. It is called when a new object is instantiated, and it’s used to initialize the attributes of the class.
Now, let’s create an object of the Robot class:
r1 = Robot("Addison", "red")
r1.introduce_self()
This creates an instance of Robot named r1 with the name “Addison” and the color “red”. We then call the introduce_self method to make the robot introduce itself.
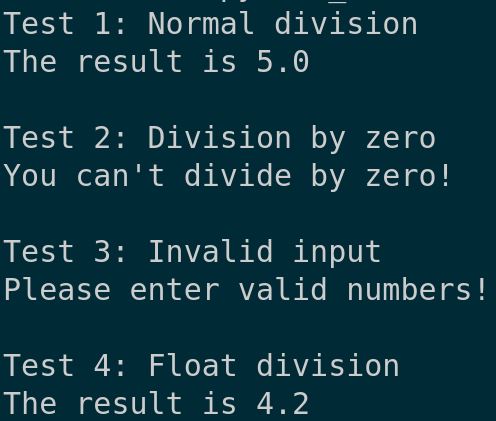
You should see the output:

This demonstrates how we’ve created a Robot object and used its method to perform an action.
Using classes and objects in robotics programming allows you to encapsulate behaviors and states associated with specific robotic components or subsystems, making your code more modular, reusable, and easier to manage. For example, each sensor or actuator can be modeled as an object with its methods for starting, stopping, and processing data.
Implementing a Basic Constructor
Let’s learn how to implement a basic constructor in Python, specifically within the context of robotics.
Constructors are important for initializing robot objects with specific settings or parameters right when they’re created.
In Python, a constructor is defined using the __init__ method of a class. It is automatically invoked when a new object of that class is created.
The __init__ method can take parameters that define the initial state of the object. This is essential for robotics, where each robot might need specific configurations right from the start.
Let’s create a simple class called Robot. This class will have attributes such as name, type, and sensor_count, which we will set using the constructor.
Create a program called robot_constructor.py inside the following folder: ~/Documents/python_tutorial.
Write this code:
class Robot:
def __init__(self, name, type, sensor_count):
self.name = name
self.type = type
self.sensor_count = sensor_count
print(f"Robot created: {self.name}, a {self.type} robot with {self.sensor_count} sensors.")
Here, the __init__ method initializes each new Robot instance with a name, type, and sensor count. These attributes allow us to differentiate between various robots, catering to different roles and functionalities in a robotics lab or factory.
Now, let’s create instances of our Robot class to see the constructor in action:
r1 = Robot("Atlas", "Humanoid", 5)
r2 = Robot("Spot", "Quadruped", 4)
This code creates two robots: “Atlas,” a humanoid robot with 5 sensors, and “Spot,” a quadruped robot with 4 sensors.
Now run this script.

You should see output indicating that the robots have been successfully created with their respective attributes. This output verifies that our constructor is working as expected, initializing each robot with its specific characteristics.
Overriding a Function
Let’s explore the concept of overriding functions in Python, particularly in the context of object-oriented programming. This technique is essential in robotics programming when you need different implementations of the same method in parent and child classes.
Let me explain how overriding works with an example from robotics. Imagine you have a basic robot (parent class) that can move and dock to a charging station. When you want to create a special type of robot (child class) that does these actions differently, that’s where overriding comes in.
In programming, overriding lets you take a behavior that already exists in a parent class (like how the robot moves) and give it a new set of instructions in the child class (like making a cleaning robot move in a specific pattern). It’s like saying “ignore the original instructions and use these new ones instead.”
Before we dive into overriding, you need to understand inheritance, which is how we create new types of robots based on our basic robot design. Just like a cleaning robot inherits all the basic features of the basic robot, a child class inherits all the code from its parent class.
Let’s create a base class called Robot. This class will have a simple method that describes the robot’s operation.
Create a file named function_override.py inside the following folder: ~/Documents/python_tutorial, and write this code:
class Robot:
def action(self):
print("Performing a generic action")
Here, our Robot class has one method, action, which prints a generic message about the robot’s activity.
Now, let’s create a subclass (also known as “child class”) called FlyingRobot that inherits from Robot class and overrides the action method to provide more specific behavior:
class FlyingRobot(Robot):
def action(self):
print("Flying")
In the FlyingRobot subclass, we redefine the action method. When we call the action method on an instance of FlyingRobot, it will print “Flying”, which is specific to flying robots, instead of the generic action message.
Let’s see this in action. We’ll create instances of both Robot and FlyingRobot and call their action method:
generic_robot = Robot()
generic_robot.action() # This calls the base class method
flying_robot = FlyingRobot()
flying_robot.action() # This calls the overridden method in the subclass
Save this script, and run it.
You should see this output:

This output shows how the action method behaves differently depending on whether it’s called on an instance of the Robot or the FlyingRobot.
Overriding methods is particularly beneficial in robotics when you deal with different types of robots that might share some functionalities but also have unique behaviors. By using overriding, you can ensure that each robot type performs its tasks appropriately while still inheriting from a common base class.
That’s it for this tutorial on function overriding. Thanks, and I’ll see you in the next tutorial.
Keep building!